Executive Summary
Our company's proposal to achieve 90 days of continuous seismic activity monitoring on Venus takes a measured but efficient approach. Leveraging newly developed technology and systems for both cost-saving and functionality, our company plans to launch a combined orbiter/lander spacecraft on a newly developed SpaceX Falcon Heavy Rocket to reach Venus. Although Venus is close enough to Earth for a portion of its orbit to allow direct communications with Earth, we have chosen to include a relay orbiter in our design to add reliability to the data link and reduce the overall risk associated with the mission. A detailed assessment of this option is found here.
Based on Venus launch windows, we look to begin our mission in mid-2015 by launching our spacecraft into Type-I Heliocentric Orbit to reach Venus in 144 days. Upon arrival at Venus and the execution of a Venus Orbital Insertion (VOI), our landing module will detach from its relay orbiter and land on Venus close to the site of the Venera 7 landing, near the planet's equator.
Our lander will be constructed with a 0.9 m diameter Titanium shell with a crush ring landing pad designed to withstand the intense pressures and temperature on Venus, similar to concepts being considered by NASA currently.1 It will be powered by newly developed Stirling Radio-isotope Thermal Generator (RTG) which is designed to work at high temperatures. In addition to powering mission essential electronics and sensors, the Stirling RTG will operate a cooling system designed to keep the internal temperature of the lander to 300°C. An internal operating temperature of 300°C will allow currently available Silicon on Insulator (SOI) electronics to be used for the lander. In addition to reducing the overall cost of electronics compared high-temperature SiC electronics options, SiC electronics are not currently developed to the point where they will be viable for use in the near future. Our lander will operate with a power budget of 400 W, and will send and receive to and from our relay orbiter on a C-band (3 GHz) signal due to the high attenuation from Venus's thick atmosphere.
Our relay orbiter will be put into a circular equatorial Venus orbit with a period of 12 hours to ensure adequate signal strength and exposure time to our lander as well as clear line of sight back to Earth for the 90 day mission window. Our orbiter will be powered with a solar cell array and function solely as a transponder for the purposes of the mission. It has a planned power budget of 200 W and will relay data to and from the Venus Lander on in the C-band (3 GHz) while relaying data from and to Earth on the Ka-band (30 GHz). The option to include additional functionality for the orbiter for possible concurrent or follow-on missions is a realistic and viable option, but is not thoroughly explored in this report.
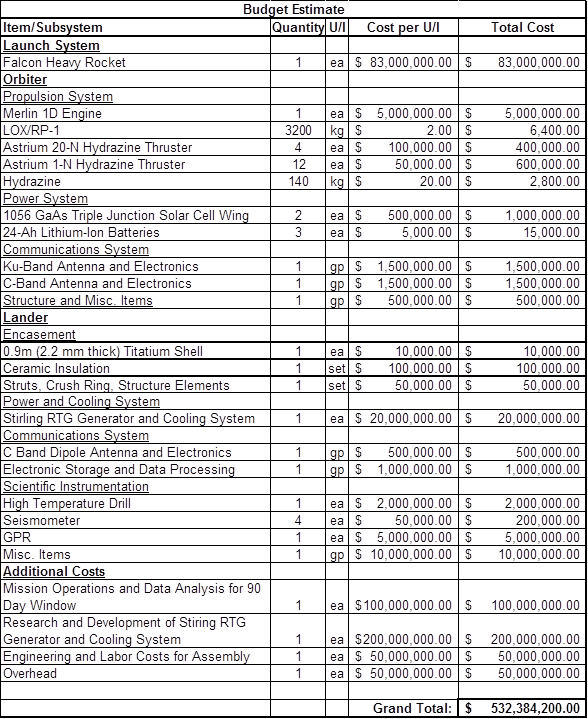
An assessment of potential risks and mitigation, timeline, as well as an estimated itemized budget is included at the end of this report. We estimate that it will cost $533 million to full fund this mission.
Orbital Mechanics and Propulsion
Launch System
Our choice of launch system is the new SpaceX Falcon Heavy Rocket. While we had considered using the slightly smaller and cheaper Falcon 9 rocket, due to the weight requirements of our mission (primarily the fuel required for the Venus Orbital Insertion maneuver), we needed to upgrade to the Falcon Heavy Rocket. At a listing price of $83M1, the Falcon Heavy Rocket is almost $30M cheaper than the Atlas V 551 rocket2, the smallest Atlas V rocket that could meet our payload.
While primarily designed as a heavy lift vehicle for large satellites to be put into Earth Orbits, the Falcon Heavy is more than capable of launching satellites for interplanetary missions. The Falcon Heavy is currently in the final stages of its development with its test flight scheduled for 2014 and its first mission set for 2015 for the U.S. Air Force4. This operational timeline fits with our planned launch schedule of May 2015. While the exact payload specifications for the Falcon Heavy to escape velocity are currently unavailable due to it still finishing its testing phase, we are able to provide a good estimate by comparing it with the Falcon 9 rocket which is currently in use. The Falcon 9 rocket can currently support up 2400 kg to escape velocity5. By comparing the mass to GTO for the Falcon 9 and Falcon Heavy Rockets, the Falcon Heavy can carry about 2.5 times as much as the escape velocity. Using this conservative estimate, the Falcon Heavy will be able to at least carry 6000 kg to escape velocity, approximately 1000 kg more than our planned mission weight. This confirms that the Falcon Heavy will be able to meet our mission requirements.
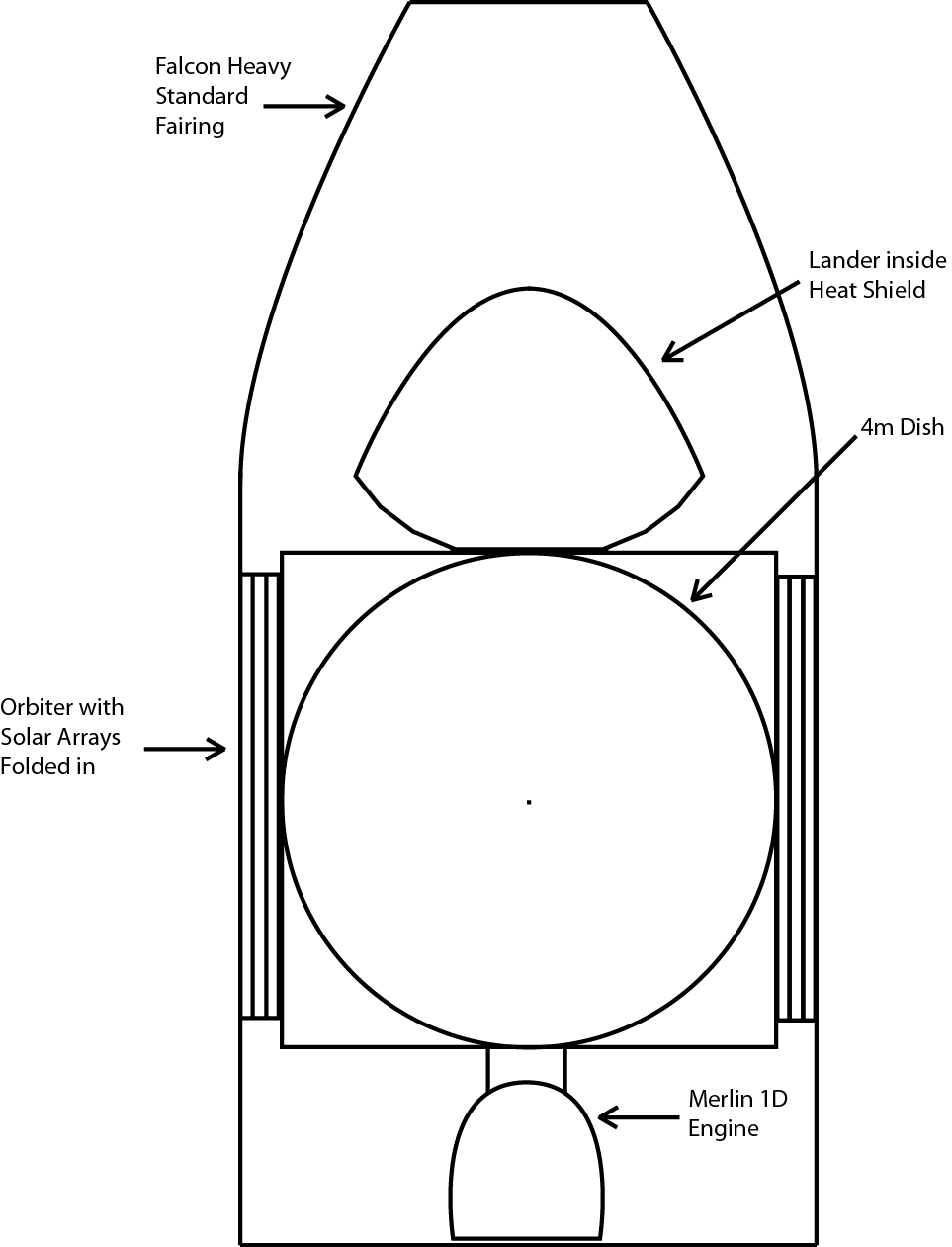
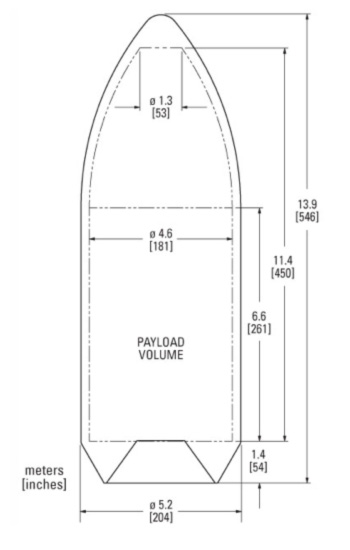
The Falcon Heavy provides a standard fairing as depicted in the image to the side. At 11.4 m tall with a diameter of 5.2 m, this standard fairing will provide adequate space for our spacecraft. When approved, we can coordinate with SpaceX directly to refine the details of Falcon Heavy configuration (fuel and weight specifications) for our mission.
Orbital Path and Venus Orbital Insertion
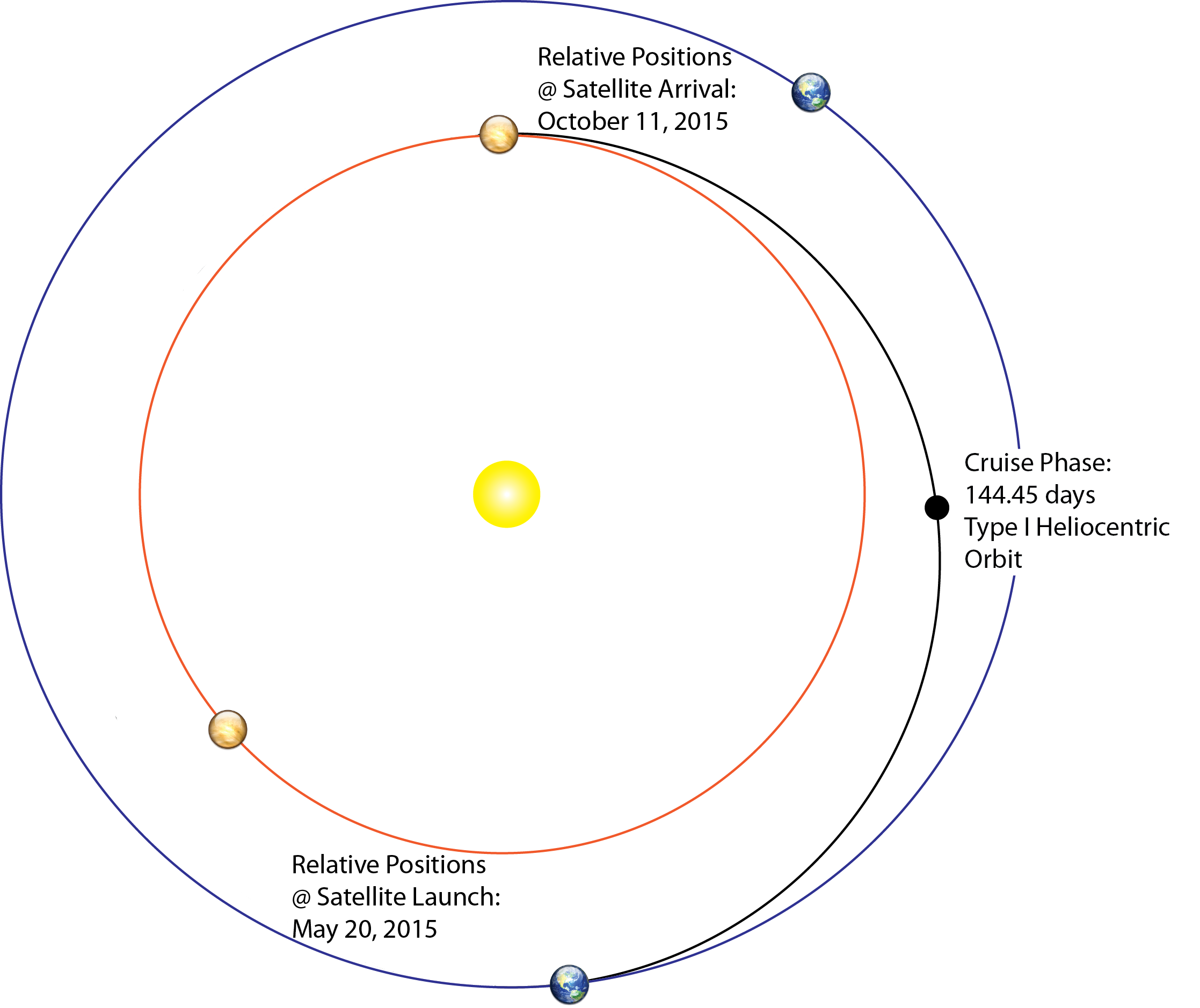
Upon launch with the Falcon Heavy Rocket on May 20, 2015, our spacecraft will enter a Type I (less than 180°) Heliocentric orbit. With a starting velocity of 27.2704 km/s once the spacecraft has escaped the Earth's gravitational field, our satellite will be in a Hohmann Type Transfer orbit of eccentricity 0.1611. As depicted in the figure below, the cruise phase will take approximately 144.45 days to reach Venus with the Satellite arrival occurring on October 11, 2015 with the spacecraft reaching within 100,000 km of Venus, well within the influence of its Gravitational Field.
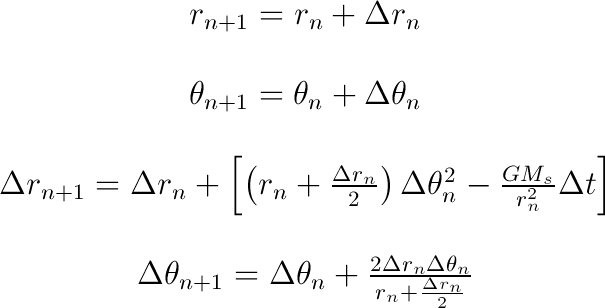
The orbital paths of Venus, Earth, and the spacecraft were calculated in MATLAB (see code here) using the following discrete difference equations in polar coordinates:
where  is the radius of the body,
is the radius of the body,  is the angle of that body with respect to the x-axis of the coordinate system (corresponding to the inferior conjunction of Earth and Venus),
is the angle of that body with respect to the x-axis of the coordinate system (corresponding to the inferior conjunction of Earth and Venus),  is the gravitational constant, and
is the gravitational constant, and  is the mass of the sun. This model considered the exact elliptical orbits of Venus, Earth, and the spacecraft, as well as their relative positions based on the inferior conjunction date of August 15, 2015. However, this assumed only the gravitational effects of the Sun and as well as that Venus, Earth, and the Spacecraft were all in the same plane of orbit. While these assumptions introduce some inaccuracy to the model, it provides a good physical understanding of the process and a good approximation of the transit time within 10-15 day window. Once selected and funded, additional modeling will be done to specify exact orbital paths and timing.
is the mass of the sun. This model considered the exact elliptical orbits of Venus, Earth, and the spacecraft, as well as their relative positions based on the inferior conjunction date of August 15, 2015. However, this assumed only the gravitational effects of the Sun and as well as that Venus, Earth, and the Spacecraft were all in the same plane of orbit. While these assumptions introduce some inaccuracy to the model, it provides a good physical understanding of the process and a good approximation of the transit time within 10-15 day window. Once selected and funded, additional modeling will be done to specify exact orbital paths and timing.
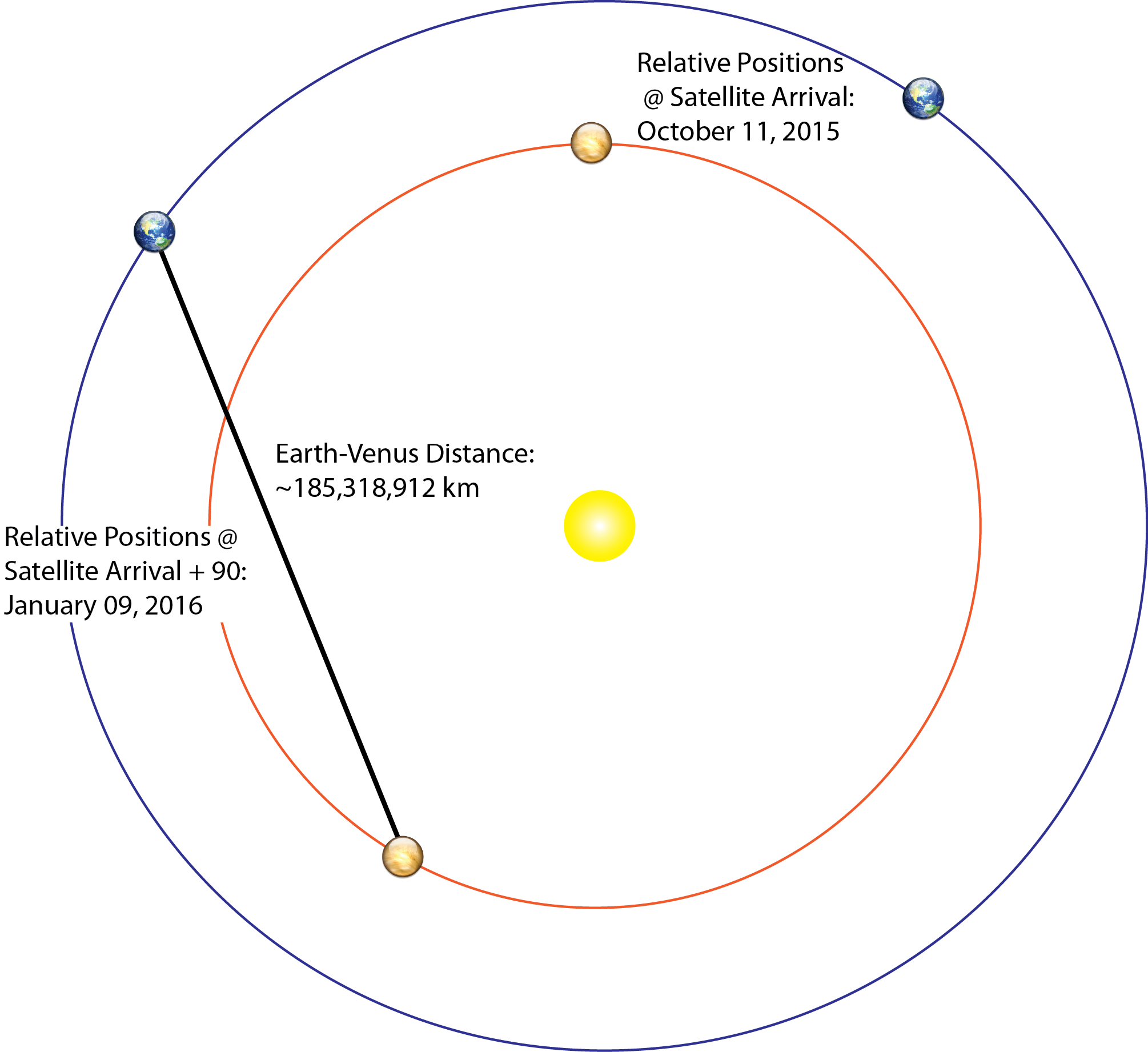
Assuming an arrival date of October 11, 2015, as depicted in the above diagram, the distance between Earth and Venus at the end of the 90 day mission will be approximately 185,318,912 km.
Once our spacecraft has reached the end of its cruise phase and is within approximately 100,000 km of Venus, it will initiate its Venus Orbital Insertion (VOI) sequence. Based on the previous MATLAB simulation, the approximate velocity of Venus at this time is 35.263 km/s while our spacecraft will be traveling at approximately 37.737 km/s. This will require a change in velocity (Δv) of approximately 2.5 km/s. Deriving what this required for this Δv from Newton's Second Law, we find that:

where  is the thrust from the main engine in kN,
is the thrust from the main engine in kN,  is the mass of the spacecraft before firing,
is the mass of the spacecraft before firing,  is the mass flow rate through the engine in kg/s, and
is the mass flow rate through the engine in kg/s, and  is the time the engine is fired.
is the time the engine is fired.
Assuming a total mass of 5246 kg before firing, the main engine, a Merlin 1D Vacuum Variant (see specifications here), will need to be fired for approximately 12.36 seconds and will consume 2966 kg of fuel to complete the VOI and allow the spacecraft to enter a circular equatorial orbit.
Satellite Orbit & Probe Insertion
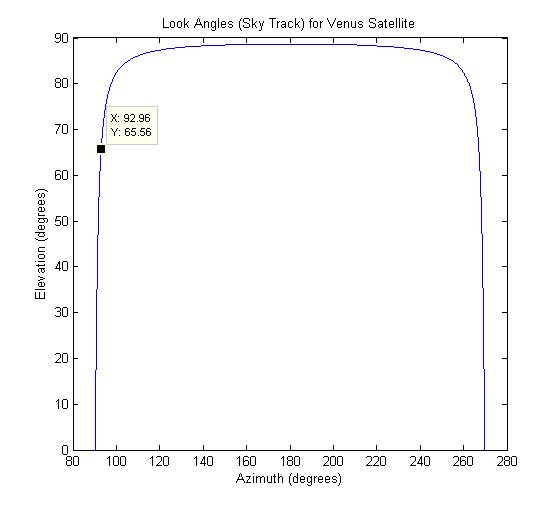
Once our spacecraft has completed its VOI maneuver, it will enter a circular, equatorial orbit with a period of 12 hours at an altitude of 18,806 km. The reason this particular orbit was chosen is that with an equatorial orbit, our relay satellite will have the same sky track for our Venus probe for the entire 90 day period with only the time that the transit occurs being a variable. This eliminates the need for the lander to point its antenna, thus simplifying the design that is already under heavy constraints from the surface temperature and pressure. Once in orbit, our Venus Lander will detach from the main spacecraft and fall to Venus landing at a position of 1°N, 10°W, near the site of the Venera 7 lander1.
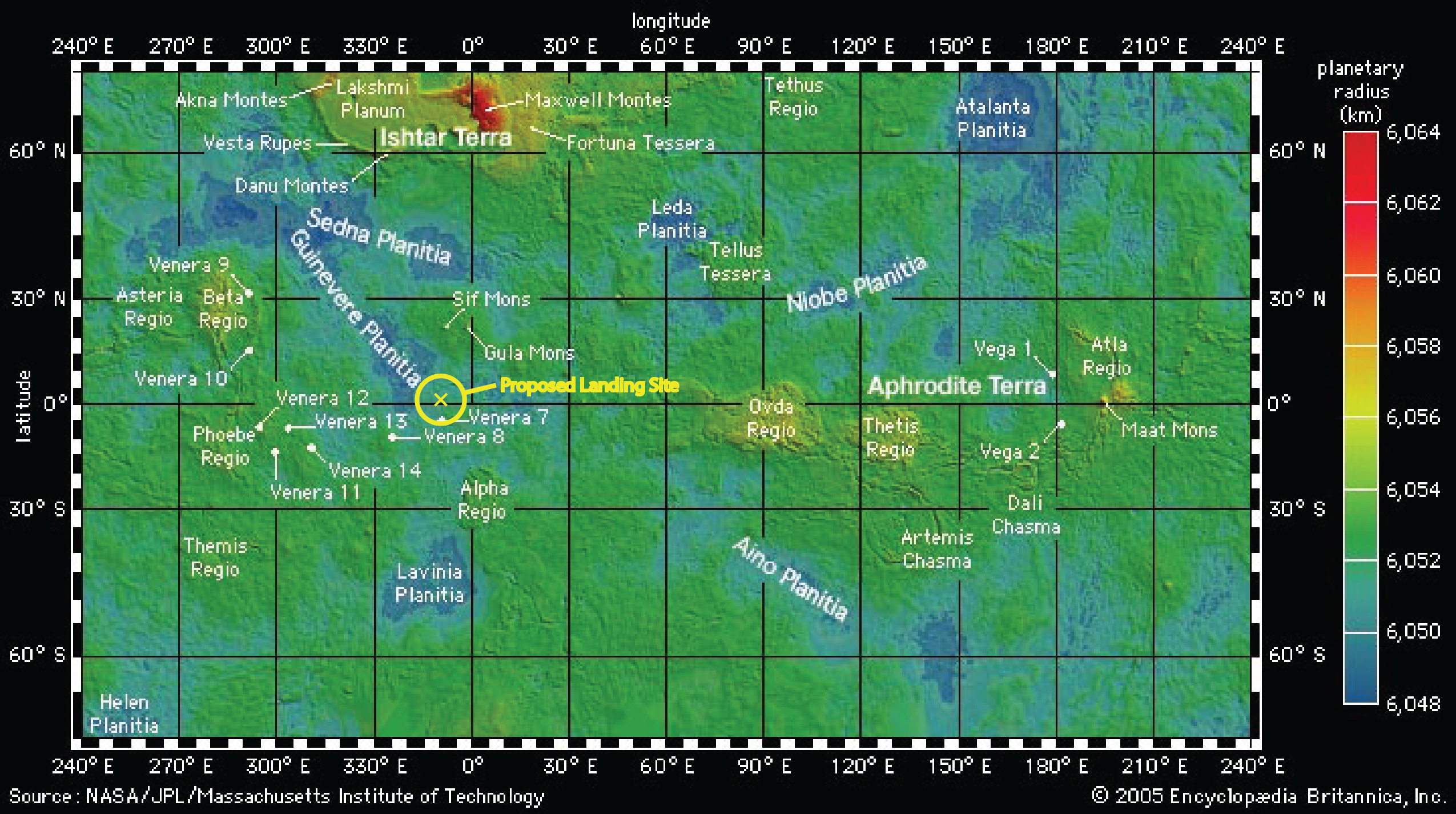
This location's longitude was chosen because it will ensure that the lander is on the side of Venus that is oriented towards Earth. This means that when the orbiter is overhead it will have line-of-sight back to Earth, allowing for a direct retransmission of the probe's data rather than having to process the signal on the orbiter, saving on cost and complexity of the design. Because of Venus's slow retrograde revolution, the lander will maintain this orientation with respect to Earth for the entire 90 day mission window. A site near the equator was chosen as this will ensure that for our sky track, look angles are high and will minimize attenuation from the Venus atmosphere. The sky track for planned landing location is depicted below:
Based on the sky track (code available here), listed below is that amount of time that our orbiter satellite will be within certain beam width for our lander.
| Angle Spread | Exposure Time |
|---|---|
| 119.94° | 3 hrs, 10 min, 45 sec |
| 89.95° | 2 2hrs, 19 min, 55 sec |
| 59.95° | 1 hr, 31 min, 40 sec |
| 29.929° | 45 min, 10 sec |
By using an antenna with a gain of 3 dB and HPBW of 120°, we ensure that there will be at least 3 hours to transmit data from the lander to the orbiter every 12 hours.
Propulsion System
The primary propulsion system for our spacecraft will be the Merlin 1D Vacuum Variant developed by SpaceX with will be supplemented by a series of six hydrazine thrusters for minor course corrections. The Merlin 1D is a liquid propellant rocket that uses LOX and RP-1, rocket grade kerosene, as its fuel1. At an engine weight of 440 kg2, a thrust of 720 KN, and specific impulse of 3.0 km/s3 this rocket has a thrust-to-weight ratio of 150, among the highest ever achieved for a liquid fuel rocket. The relative lightweight of this engine combined with his high thrust-to-weight ratio were the primary motivators behind this selection. Additionally, because this is the same type of rocket used in the Falcon Heavy that we are using for our launch system also produced by SpaceX, we will have the advantage of working with a company who is already involved in our mission.

A newly designed rocket, the Merlin 1D achieved flight qualification on March 20, 2013 and its vacuum variant completed its firing test on 30 September 2013. It is anticipated that the Merlin 1D vacuum variant will achieve flight qualification well in advance of our 2015 mission date. Since the relation between an engine's thrust and specific impulse is defined by5:
where  is the thrust obtained from the engine in kN,
is the thrust obtained from the engine in kN,  is the specific impulse of the engine in km/s and
is the specific impulse of the engine in km/s and  is the mass flow rate through the engine in kg/s, we find the for the Merlin 1D is approximately 240 kg/s. The largest maneuver for our main engine will be the Venus Orbital Insertion (VOI). As stated in the VOI section, there will be a required 2.5 km/s velocity change required for the VOI. Using the specifications for our main engine and formula for velocity change derived from Newton's Second Law:
is the mass flow rate through the engine in kg/s, we find the for the Merlin 1D is approximately 240 kg/s. The largest maneuver for our main engine will be the Venus Orbital Insertion (VOI). As stated in the VOI section, there will be a required 2.5 km/s velocity change required for the VOI. Using the specifications for our main engine and formula for velocity change derived from Newton's Second Law:
where  is the thrust from the main engine in kN,
is the thrust from the main engine in kN,  is the mass of the spacecraft before firing (5246 kg),
is the mass of the spacecraft before firing (5246 kg),  is the mass flow rate through the engine in kg/s, and
is the mass flow rate through the engine in kg/s, and  is the time the engine is fired; we find that for the VOI the main engine must be fired for 12.36 seconds and will consume 2966 kg of fuel. To allow for additional corrections for the orbital path and some station keeping, we are planning of 3200 kg of main engine fuel.
is the time the engine is fired; we find that for the VOI the main engine must be fired for 12.36 seconds and will consume 2966 kg of fuel. To allow for additional corrections for the orbital path and some station keeping, we are planning of 3200 kg of main engine fuel.
For more refined orbital corrections and altitude control our main spacecraft will also have 4 Astrium 20N Hydrazine thrusters and 12 1N Hydrazine thrusters at as well as three internal reaction wheels. At 0.395 kg per thruster6 for the 20 N thrusters and 0.200 kg per thruster7, these additional thrusters will additional 4 kg. The planned fuel allocation for hydrazine will be 140 kg and the three reaction wheels are estimated to weigh 3kg, bringing the total weight for the hydrazine and reaction wheel system to 147kg. This configuration is similar to Magellan spacecraft8 sent to Venus in 1989 and was used due to similar mass and size of that satellite with our planned spacecraft.
Communication System
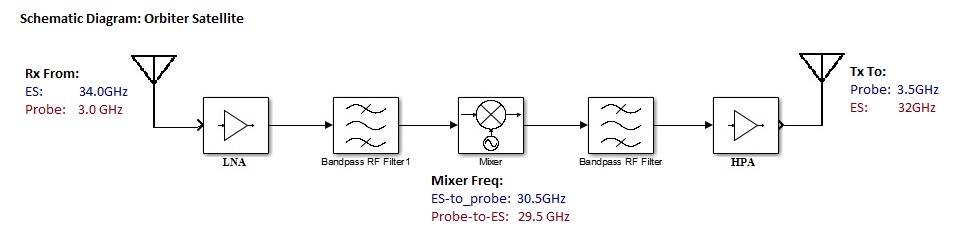
The communication link for this mission will be accomplished using a relay satellite between Earth station and the probe on Venus. This relay satellite will be in a circular orbit around Venus at an altitude of 18,806 km with a 12 hour orbital period. The communication link design is divided into two major block: Earth-to-Satellite Communication Path (ESCP) and Satellite-to-Probe Communication Path (SPCP). Sensors on the probe include a Seismic Sensor (Seismometer) to study Venus's seismic activity and a supplemental Ground Penetrating Radar (GPR). The GPR serves as a back-up and supplement to the more sensitive seismometer. The block diagram of the communication links are shown below.


Earth to Satellite Communication Path (ESCP)
Antenna Design
We begin our design with the knowledge of the earth station antenna, which is a 34 m Dish Antenna owned by NASA Deep Space Network (DSN) in location 120° apart from each other(Spain, U.S.A, and Australia) so as to cover a 360° view of space. The receive antenna with known parameters is shown in the figure below.

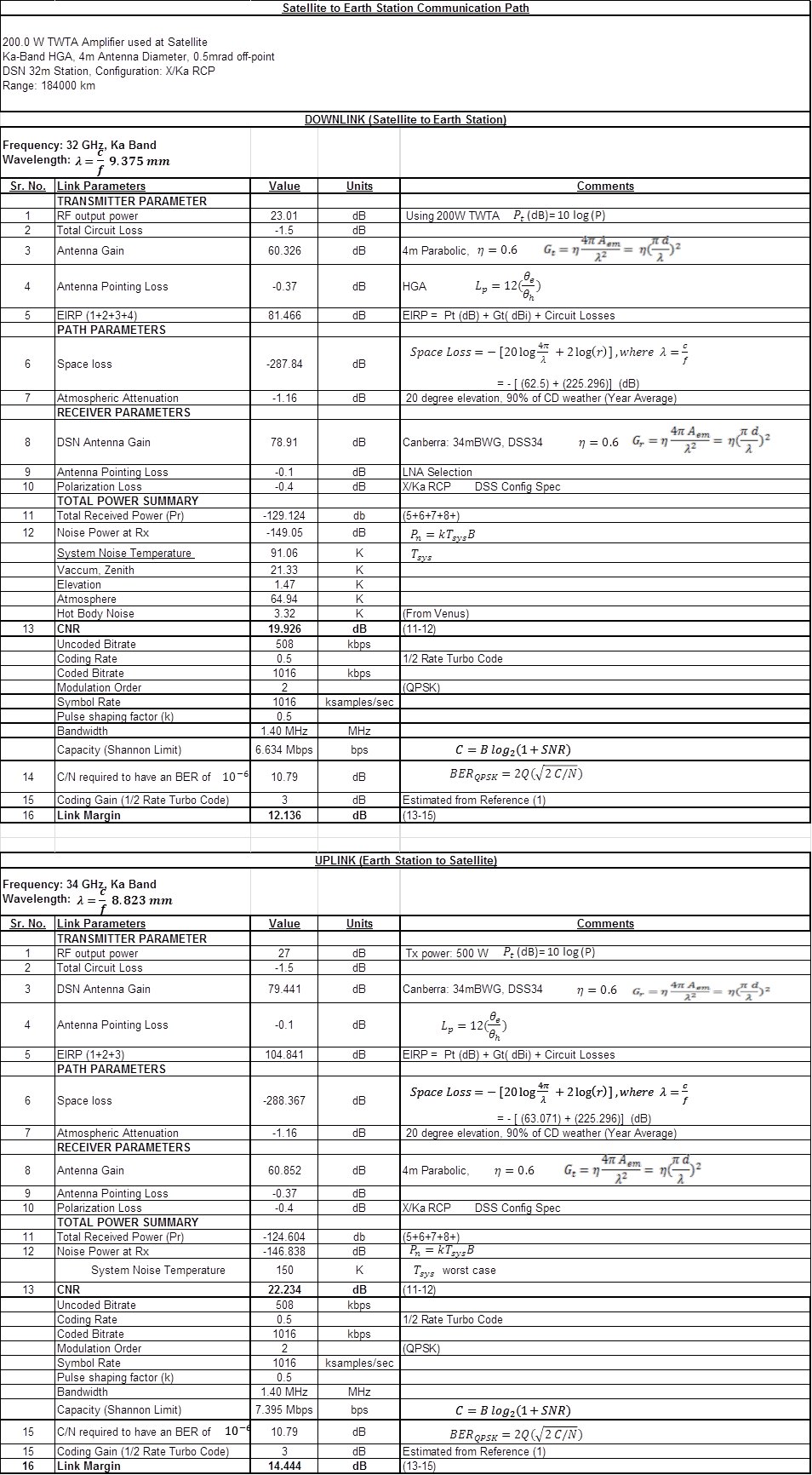
For the link between earth and the satellite, we used a Ka-band carrier frequency of 32GHz because of the low atmospheric absorption at such band of frequencies. The small wavelength at this frequency (9.4mm) also means a higher resolution for the antenna which increases the gain of the antenna.
The gain  of this antenna is calculated using the equation
of this antenna is calculated using the equation
where  is the efficiency,
is the efficiency,  is the aperture's physical area, and
is the aperture's physical area, and  is the operational wavelength. From the equation above, the gain obtained for the 34 m antenna is 78.8 dBi.
is the operational wavelength. From the equation above, the gain obtained for the 34 m antenna is 78.8 dBi.
Noise Power
The thermal noise power at the earth station antenna was calculated using

where  is Boltzmann's constant,
is Boltzmann's constant,  is 1.4 MHz of bandwidth, and the system temperature is
is 1.4 MHz of bandwidth, and the system temperature is  . A system temperature of 91 K is achieved by cooling the antenna components with liquid nitrogen. From this calculation the total earth station noise power is -149 dB.
. A system temperature of 91 K is achieved by cooling the antenna components with liquid nitrogen. From this calculation the total earth station noise power is -149 dB.
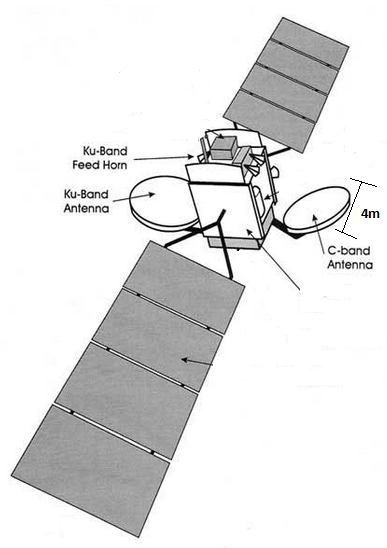
For this design, we chose two 4 m parabolic dish antenna on-board the satellite as shown in figure to the left. One reflector is for communicating with earth station (Ka-band) while the other is pointed towards the probe on the surface of Venus (C-band).
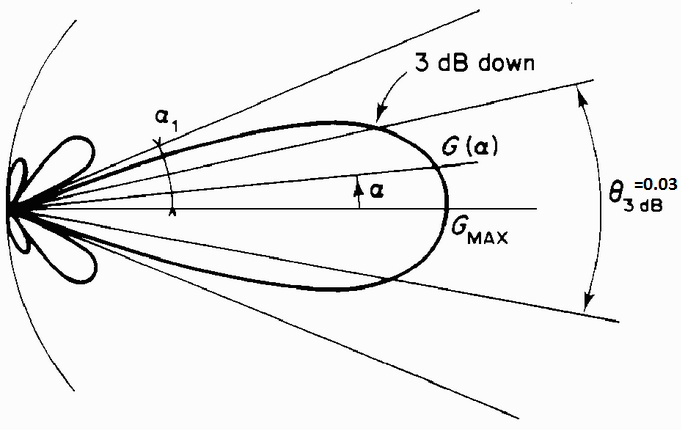
The gain of the 4 meter dish antenna pointing towards earth is calculated using the same equation previously. The and is evaluated as 60 dBi, for the dish operating at the Ka-band (32GHz). The half power beam-width for this gain calculated using  = 0.03°, is illustrated by the figure below.
= 0.03°, is illustrated by the figure below.
The signal to noise ratio (SNR) obtained using the calculated values for Received power (PR) and Noise Power (PNoise) is (-128dB + 149dB = 21dB). With a high level of SNR available, it is clear that there is sufficient room for maximum sample rate according to the Shannon Channel Capacity theorem, given by:
Baseband Control Signal
The baseband signal sent from earth station to the probe via the orbiting satellite will mostly be control signals to an embedded microcontroller on-board the probe. This control signal will be used to operate the seismic sensor drill, the Ground penetrating Radar (GPR) and station keeping of the satellite. The baseband signal is all- digital which will be sent in PACKETS. The baseband signal flow chart is shown below.
The In-phase (I) and quadrature (Q) signals have already been encoded with parity bit (redundant bits) and also pulse shaped for maximum error free detection at the satellite and probe in Venus. The error control coding employed is the 1/2 rate turbo code, and the pulse shaping used here is the Raised Cosine pulse. The analysis and design associated with the pulse shaping and error control coding will be discuss in later section under SPCP.
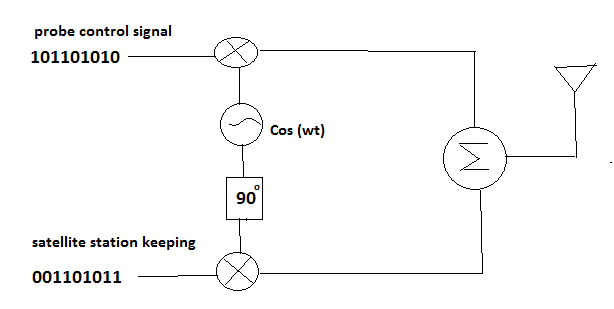
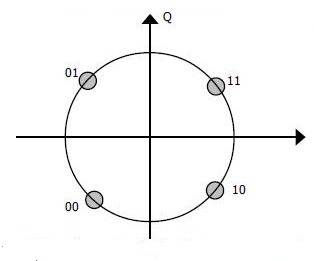
The modulation scheme employed to carry the control signal is a 4-QAM (QPSK) which has a constellation diagram with 4 states [00, 01, 10, 11] as shown in constellation figure. The signal is modulated onto a carrier of Ka-band with in-phase and quadrature components. The in-phase component carries the Venus probe control-signal while the quadrature component carry the satellite station keeping control-signal.
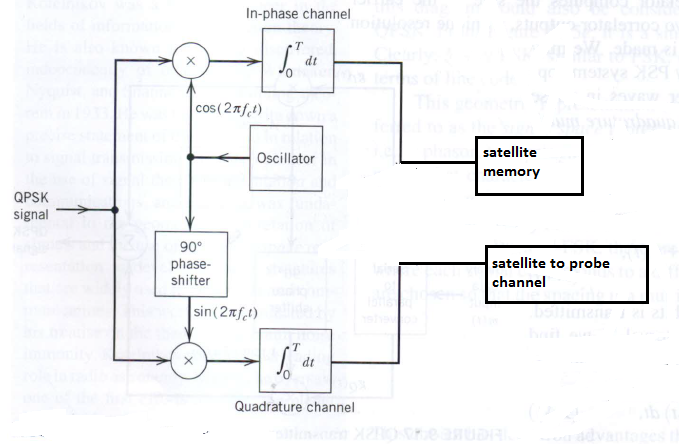
At the relay station (satellite), the in-phase control signals are saved in the embedded memory while the quadrature control-signals are routed to the satellite–to–probe channel where it is down-converted to a C-band signal for transmission to the probe on Venus. The figure below shows the block diagram of this operation.
The SNR at the receiver designed above was calculated using a varying temperature due to the varying motion of the spacecraft , but that was compensated for, by varying the supply power (power transmitted from earth) to maintain a good SNR. A 1.4 MHz bandwidth was used for the baseband digital signal transmission.
Satellite to Probe Communication Path (SPCP)
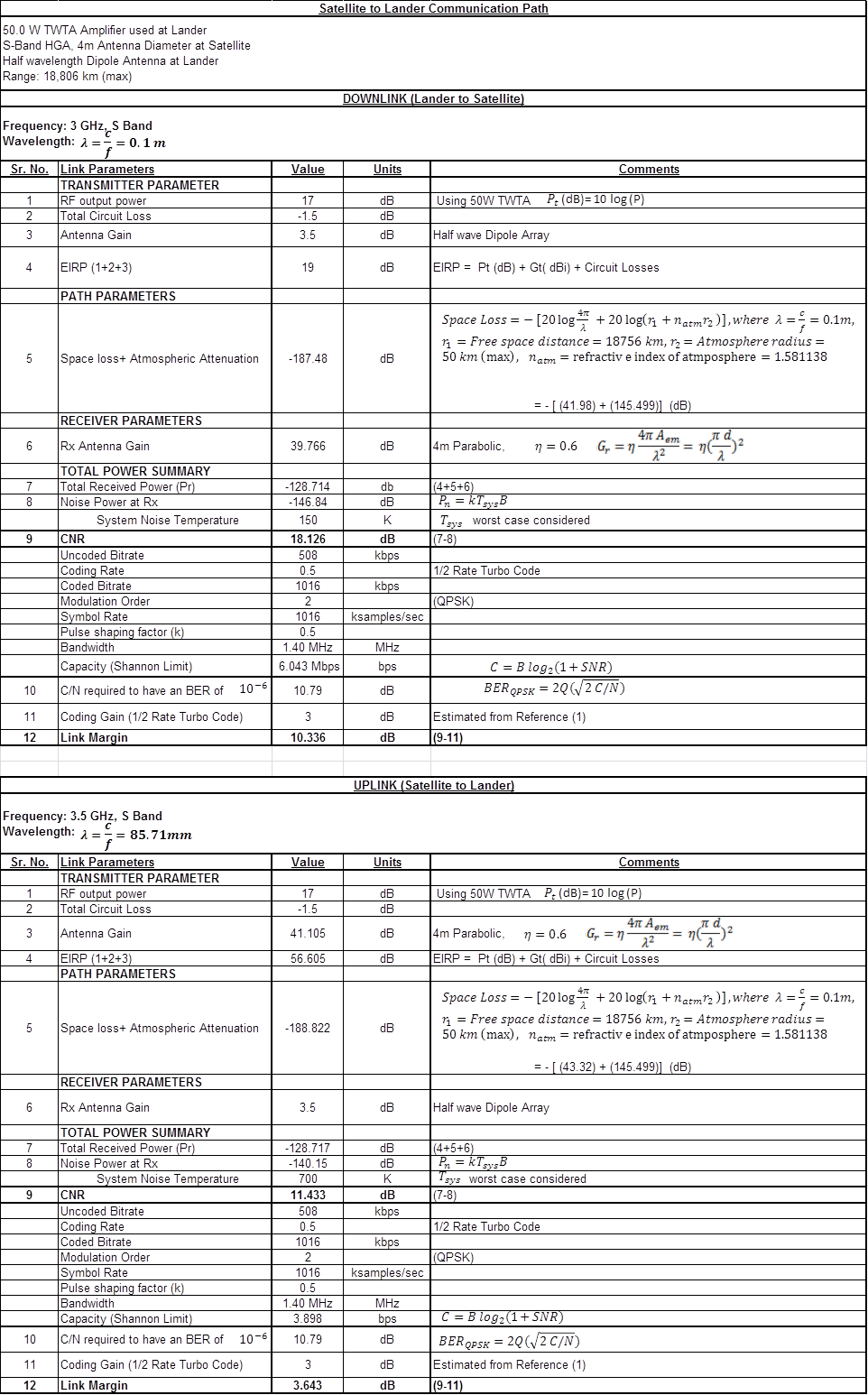
Records shows that the Venusian atmosphere is comprised of a thick layer of green-house gas (carbon dioxide), which causes the average temperature in Venus to be around 500° C (773 K), which pose a serious design problem for communication device and components. Most of the communication components will be enclosed in an insulating chamber, except for the seismic drill, the Ground Penetrating Radar (GPR) antenna, and the antenna to communicate to the satellite.
GPR Antenna
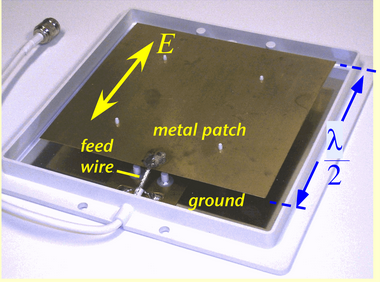
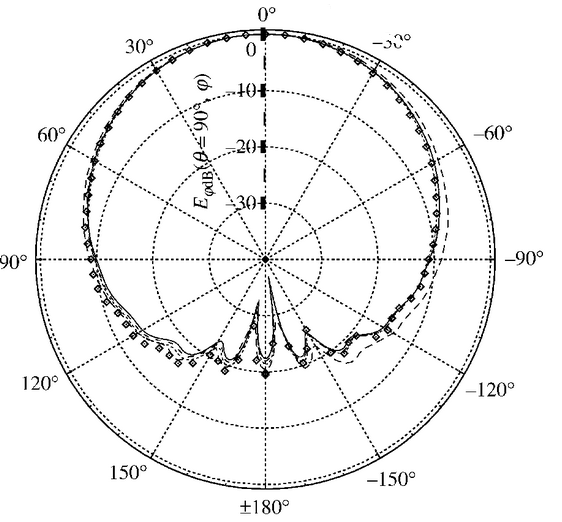
The design of the Ground Penetrating Radar antenna begins with the material consideration, a metal with a high melting point is chosen. The same antenna is used for transmit and receive mode. The frequency of operation of the GPR is 500MHz pulsed waveform with a PRF (Pulse Repetition Frequency) of 500 KHz (T=2 µs). A Microstrip Patch Antenna will be used for this application because of its wide-band capability and its radiation pattern which will be directed towards the surface of Venus. An example of the microstrip antenna used with its radiation pattern is shown.
Probe to Satellite Antenna
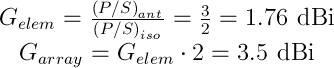
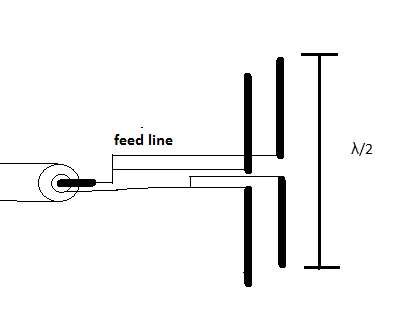
To maintain a good connection with the orbiting satellite we use a standard half-wave dipole antenna for a broad beam. The dipole is oriented parallel to the ground with a reflector beneath it. Using image theory, this creates a two element dipole array, effectively doubling our gain. There are additional nulls in the far-field from the addition of the element, but since the primary nulls are pointed along the planet's surface the link will remain strong across most of the sky. We estimate the dipole array will achieve 3 dB of gain over 120 degrees of skyview. This will enable us to stay in constant communication with the satellite during the 3 hrs of satellite visibility that occurs every 12 hours.
The frequency of operation is chosen to be in the C-band (3GHz) because it has less atmospheric attenuation. The atmosphere of Venus is 15.6 km high, therefore the path loss (dB) encountered by the signal is calculated as

where n is the square root of the relative permittivity of CO2. From this calculation, the loss due to Venusian atmosphere is -46 dB. A detailed calculation of the entire link budget can be found here.
Baseband Signal Transmission
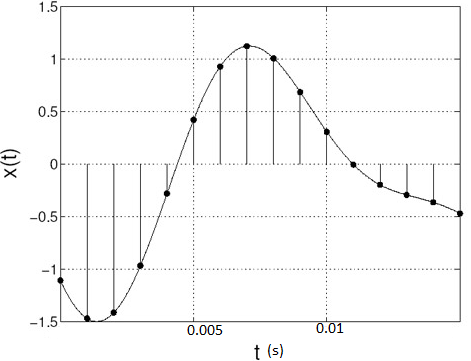
A crucial part of this mission is to be able to acquire both seismic and GPR signal, transform them into useful data and send the data on a noisy and lossy transmission channel, and still recover a useful signal /data at the receiving end. The challenge is to design a system that is robust enough to detect and correct errors that have been added to the signal/data. We begin with a typical seismic sensor waveform with highest frequency content of 100Hz, which is the typical bandwidth of such sensors. This analogue signal is sampled at a rate that prevent aliasing (10 X 100Hz), using an ADC (analogue to digital converter) as shown below.
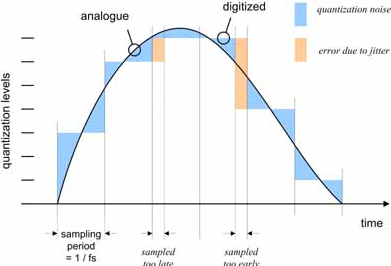
Sampling of the seismic signal result in a bit rate of 1 Kbps. The sampled discrete signal is then pass an 8 bits quantization with 64 steps which was chosen in order to achieve a Quantization SNR of 48 dB according to the formula (SNRQn = 1.8 + 6N) where N is the number of bits. This process is shown below.
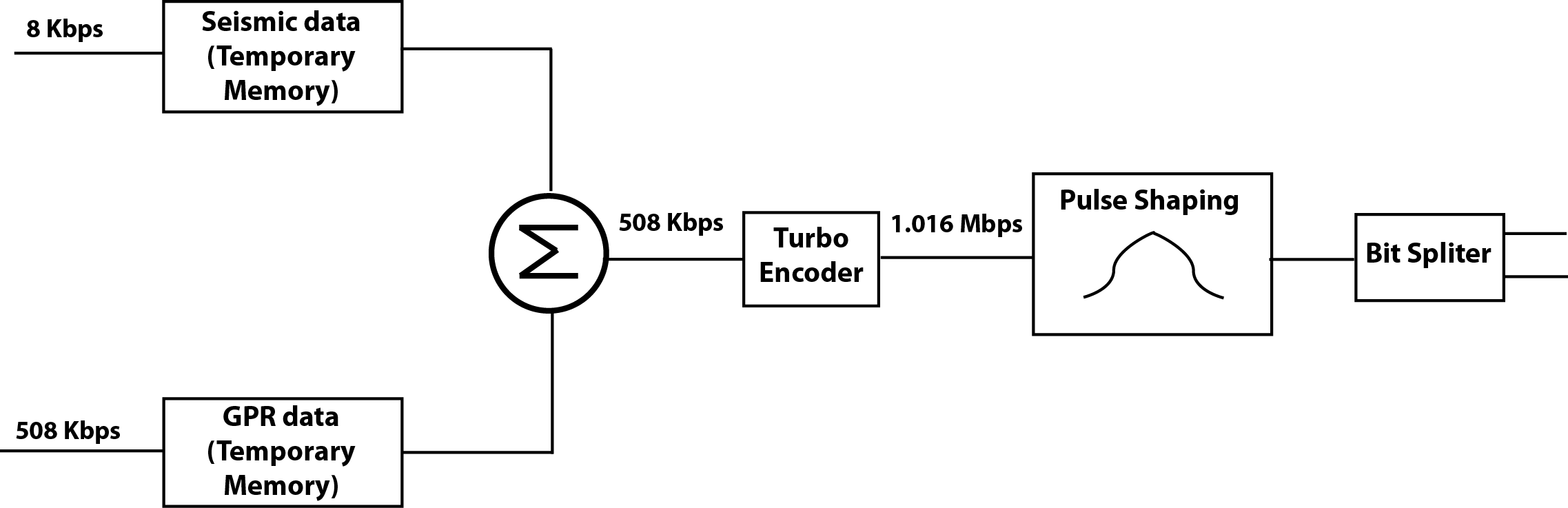
After quantization using 8bits, our baseband bit-rate is now increased to 8Kbps. At this stage, we will account for the bit accumulated from the GPR signal. The GPR baseband signal is a 500 KHz bandwidth discrete signal which is obtained from the pulsation of RF signal in an interval of T = 2 µs. This discrete time signal is added to the seismic data, resulting in a total of 508 Kbps. The bits streams are then passed through an encoder (1/2 rate turbo encoder) as shown in the block diagram below.
Pulse Shaping
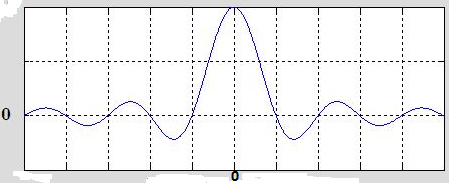
The pulse exiting the encoder are not suitable for passband transmission because the frequency response of a square pulse (using the Fourier transform) is a terrible low-pass filter as shown below.
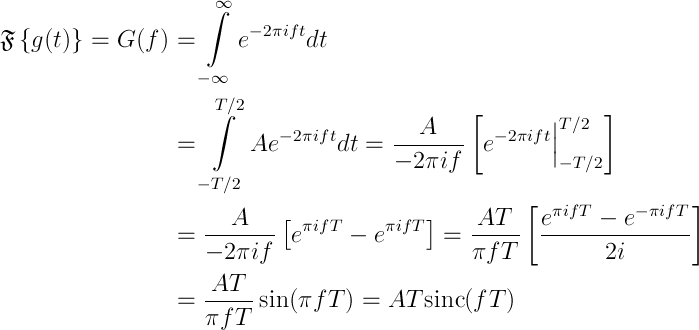
The resulting waveform is a sinc function which goes on to infinity, with frequency content from DC to + and – infinity.
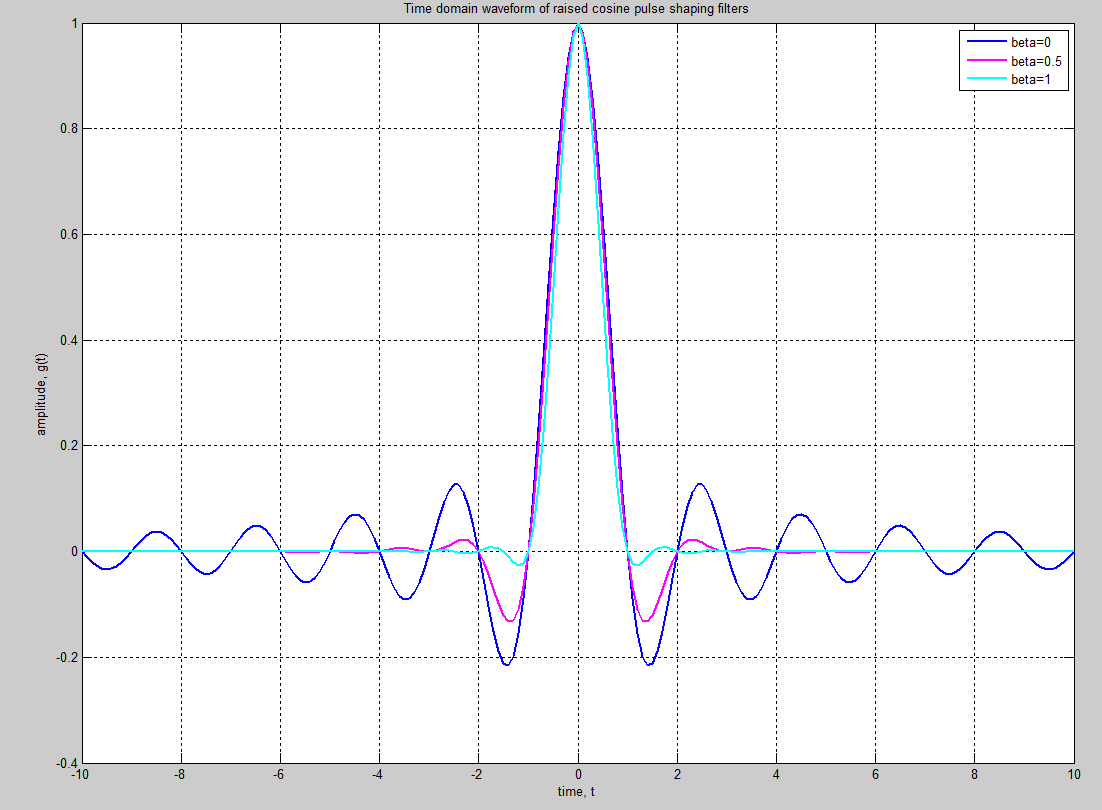
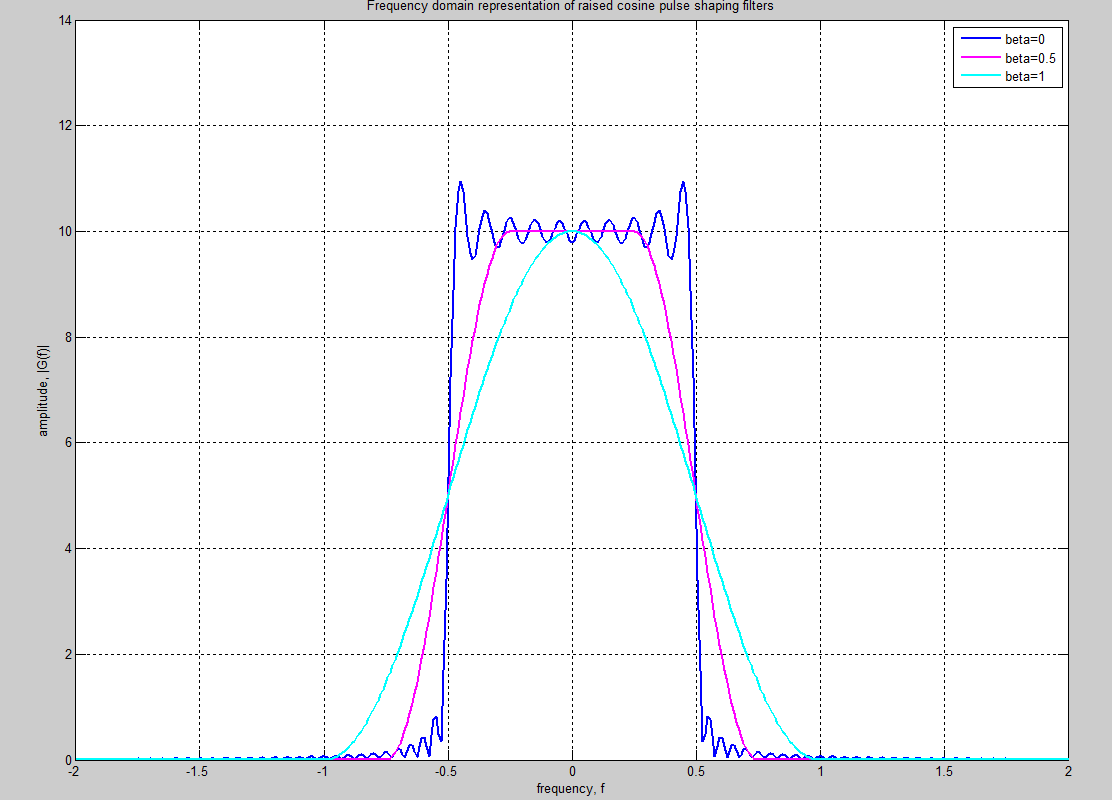
To get around this problem, we use a Raised Cosine Pulse Filter which is described in the time and frequency domain as:
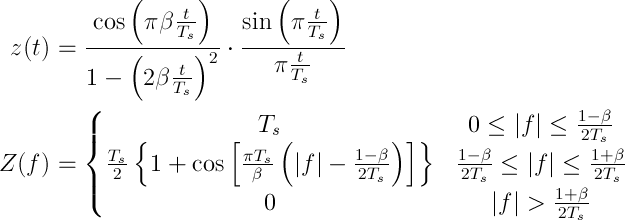
where β is the roll-off factor with value between 0 and 1. The raised cosine pulse's time and frequency spectrum is plotted below for different roll-off factors (the code is available here). We chose a roll-off factor of 0.5 for a 1.40 MHz bandwidth.
Passband Signal Transmission
The shaped pulses are now ready to be modulated onto a carrier. This is done using a QPSK Modulation scheme as shown below. The bits stream exiting the bits splitter are group to reflect the seismic Data on the In-phase line and the GPR data on the Quadrature line. The stream are modulated onto a carrier at C-band (3GHz).
Link Budget
For a usable copy of the above spreadsheets, see the code appendix.
Power & Cooling Systems
Orbiter Power
Our orbiter will serve primarily a transponder for the link between Earth and our lander. In order to accomplish this as well as to provide for some of the flight controls required, we have set our power requirements to 200W for the orbiter. Due to the proximity of Venus to the Sun, we are planning to use a solar cell array to power our orbiter. Looking a solar cells designed specifically for a Venus mission, we have examined the European Space Agency's plans for a new satellite for Venus in its Venus Express mission8. This satellite will provide a good set of new technologies that can be utilized for our smaller satellite. One new technology is the Gallium Arsenide triple junction solar panel that supplies the Venus Express 1100 W of power and are able to survive the solar rays while orbiting Venus. This design can be scaled down as our mission only requires 200 W of power for the satellite to broadcast our signals. The electronics can be space hardened similarly to how the Venus Express has done as its mission was extended past 2 Venus sidereal days9. This was done with a combination of better radiators with a multi-layer insulation (MLI) coating for thermal control and a gold colored MLI coating to reflect additional radiation away.
Lander Power & Cooling System
The orbiter needs to be space hardened and also to a point heat hardened as the systems at Venus will experience greater solar intensity due to the distance of the Sun. The European Space Agency has developed a new satellite for Venus in its Venus Express mission8. This satellite will provide a good set of new technologies that can be utilized for our smaller satellite. One new technology is the Gallium Arsenide triple junction solar panel that supplies the Venus Express 1100 W of power and are able to survive the solar rays while orbiting Venus. This design can be scaled down as our mission only requires 200 W of power for the satellite to broadcast our signals. The electronics can be space hardened similarly to how the Venus Express has done as its mission was extended past 2 Venus sidereal days9. This was done with a combination of better radiators with a multi-layer insulation (MLI) coating for thermal control and a gold colored MLI coating to reflect additional radiation away.
Although logging seismic data is a fairly simple mission objective, it is very difficult to design a lander to do it on Venus since most electronics cannot perform on the surface of Venus. The surface temperature of Venus averages around 460 degrees Celsius and greenhouse gases keep the temperature fairly constant throughout its sidereal day (around 116 Earth days). There are basic electronics that have been developed and tested at the temperatures required, but still years away from developing advanced electronics to create a fully functioning lander capable of logging seismic data and transmitting it to our orbiter. One solution is to use a radioisotope power and cooling system in order to design a lander that can withstand these temperatures for longer than a few hours.
Many power options were researched such as solar power and chemical storage. Solar power is very difficult to use due to the low light levels from the thick gases in the atmosphere. Additionally, the high temperature of the Venus surface makes photovoltaic conversion very inefficient. Solar power would require a lot of new technologies to be developed and would not be feasible in the next few years. Chemical batteries would be practical for short or low power missions but would require additional high temperature technology as well. A sodium-sulfur battery that operates efficiently at high temperatures may be an option to use for spike power uses such as drilling into the surface to place the seismometer. Even microwave beamed power is not feasible as it is still many years of development from a working system. Additional problems with the Venus atmosphere have not been investigated and would require even more time to develop a workable solution.
There are many types of radioisotope power systems, but the radioisotope Stirling system was selected based on technology availability and efficiency. NASA has gone through many radioisotope power systems starting back from the 1970's. More recently the Multi-Mission Radioisotope Thermoelectric Generator (MMRTG) was used on the Mars Curiosity Mission with an efficiency of 6-7%, but the advanced Stirling radioisotope generator (ASRG) is estimated to have an efficiency of >28%. This ASRG is approaching NASA technology readiness levels (TRL) of 7-8 which means this system has been demonstrated in high-fidelity environments and is approaching mission qualified demonstrations.
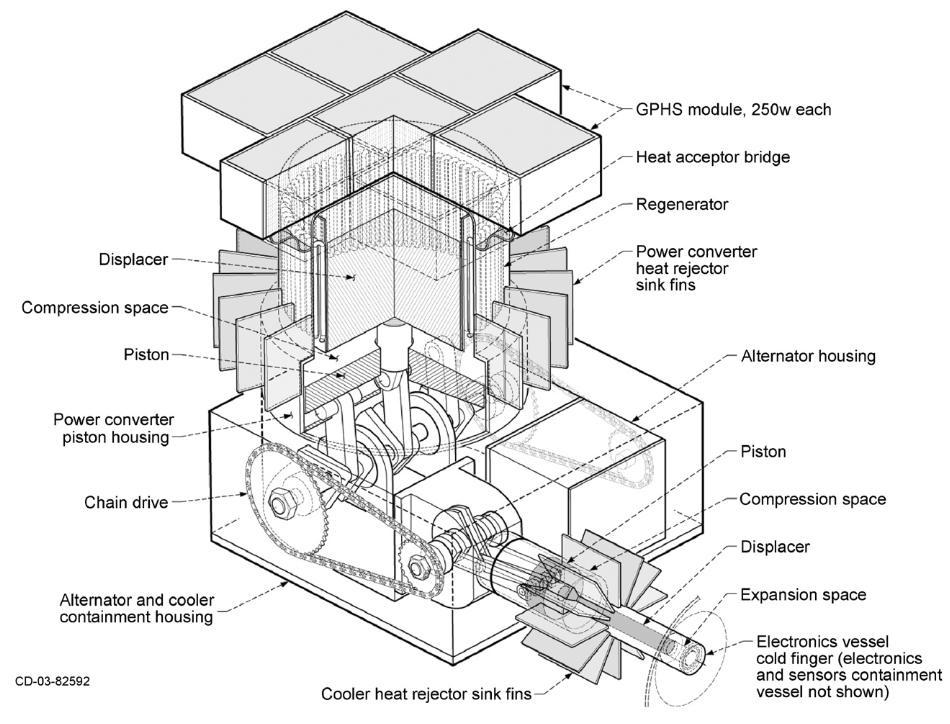
This radioisotope Stirling converter is chosen as the ideal power converter as it has a much better efficiency compared to a normal radioisotope thermoelectric converter used on Viking, Voyager, Galileo, and Cassini missions. In order for the power generator to work a Plutonium-isotope general purpose heat source (GPHS) is currently used to provide heat to the power converter. Each GPHS module was estimated to provide 250W of thermal energy. The performance of the advanced Stirling converter is currently predicted to have a mechanical output of 478W with The Sage model1. This results in a thermodynamic efficiency of 27.5% and a mechanical efficiency of 85% of was used based on results from Stirling experiments made by NASA in the 1980's1. This brings the overall efficiency of the Stirling converter to 23.4% which is far better than the ~6-7% efficiency of the normal radioisotope thermoelectric converters used on those famous missions. These results can be seen in the following table1.
| Parameter | Value |
|---|---|
| Type | Stirling cycle |
| Stages | 1 |
| Heat sink temperature | 500° C |
| Cold temperature | 200° C |
| Heat transferred | 105.7 W |
| Heat rejected | 344.6 W |
| Overall coefficient of performance | 37.6% |
| Mass | 1.6 kg |
The system now has to be cooled and the electronics need to be powered from the available power from the radioisotope Stirling converter. The total available power is estimated to be 400W due to additional losses with 100W allocated to powering the electronics and 280W of mechanical power allocated for the cooling system. The electronics will be placed in a thermal enclosure to help insulate them from the Venus atmosphere as well as help with the cooling system. This electronics enclosure is currently designed to be a 10cm sphere with a 5cm thick ceramic blanket. The cooling system that was designed is a single stage Stirling cooler with a pressure ratio of 10. Again the cooler was designed and analyzed using the Sage model. The estimated required power input is 240W for a cold sink temperature of 200 degrees Celsius from a 500 degree Celsius hot sink temperature1. (1.6kg)
This estimation would bring the enclosure temperature to 300 degrees Celsius. This is the maximum operating temperature of many electronics used today and manufactured through Silicon on insulator (SOI) technology. These components from Honeywell include Op Amps, Analog Switches, Voltage Regulators, Micro-Controllers, SRAM, Analog Multiplexers, Crystal Clock Generators, and N channel FETs2. Additional products are in development and will continued to be looked at to develop the most efficient and reliable system of communication between the lander and the orbiter.
Drill System Power
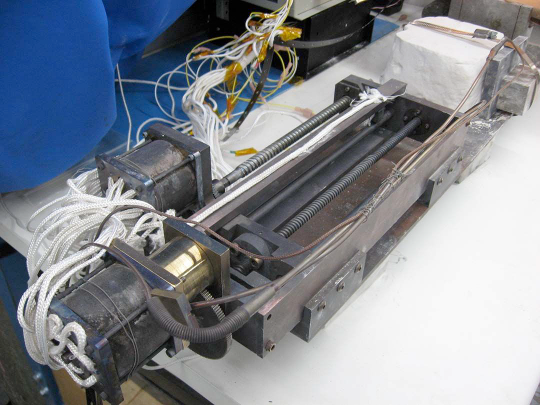
The main objective of this mission is to acquire seismic data and in order to accomplish this task a drill and seismic sensor must be designed. Also, both need to be tested to withstand both the surface composition and temperature of Venus. In order for the seismic sensor to get any meaningful data it must be placed into the Venetian surface by drilling a hole. This drill needs to be designed for the high temperatures on Venus. Several high temperature motors are available like the Switched-Reluctance Motor from Honeybee3. A Rotary drill would be used to quickly create a hole so that the seismometer can immediately begin accomplishing its mission. The drill bit used will still have to be researched and tested for Venus, but for a single hole a sharp diamond-cutting element similar to the Rock Abrasion Tool used on Mars may be suitable. A prototype of a drill used on Venus has already been tested by Honeybee and was still functioning after drilling for more than 20 hours at 460 degrees Celsius. There is continued development in creating more efficient and reliable motors at Venus-like temperatures by Honeywell, such as the next generation brushless DC motor with resolver3. After the drill has created a hole the seismometer needs to be placed in and needs to acquire data continuously for 90 days.
This center will enable high-fidelity testing for this sensor as well as the lander as it is being developed. The GEER is a chamber created by NASA specifically to recreate the pressure, temperature, and chemical composition of other planets. This chamber is 1 m in diameter and is capable essentially any atmospheric composition. It can be operated between -196 to 500 degrees Celsius and pressures from a vacuum to 100 bars. This chamber will be vital in development and testing not only the seismometer but also every other aspect of the lander4.

Electronic Resiliency
In order for the mission to be successful the components must make it through space unharmed and also survive the Venus atmosphere. First, all the necessary components need to be space hardened for the flight to Venus. This can be done through multiple ways starting with physically shielding the lander and orbiter during the flight to Venus10. Then, radiation hardening can be designed for through chip layouts by designing dopant wells and isolation trenches into the layout. Additional error detection and correction circuits can be integrated in and device specific spacing and decoupling can help mitigate the effects of radiation. Then redundant and duplicative configurations like Triple Module Redundancy can be used. Additional redundancy can be added for increased radiation damage risk mitigation down to component and board levels for the electronics in the lander and on the orbiter.
Hardening Electronics for Venus
Once the lander has made it successfully to Venus it must survive the atmospheric elements for its entire 90 day mission. The lander will need to withstand the intense pressure of Venus which is 92 times that of Earth1. Titanium is a proven material that can withstand the temperature and pressure, but there are certain developing polymer matrix composites that could allow the same strength with less weight2. Additionally, the corrosive atmosphere will need to be taken into account with the metals and materials used on the lander. Protective coating can be used and tested in the GEER facility for durability of the mission length3. Protecting it from pressure and corrosion is only one problem as the high temperature of 460 degrees Celsius is the main constraint on the functionality of the electronics. There are Silicon Carbide (SiC) electronic components in development that can operate in that temperature range4, but it may not be possible to launch the mission until the technology is thoroughly developed and tested. Instead, the lander utilizes a refrigeration system to lower the temperature to 300 degrees within an electronics enclosure. This enclosure will be encased in an additional 5cm thick ceramic material to insulate it from the outside atmospheric conditions of Venus. This lower temperature will allow for more robust electronic applications as well as immediate testing for the mission in the GEER facility567.
Orbiter Hardening
The orbiter needs to be space hardened and also to a point heat hardened as the systems at Venus will experience greater solar intensity due to the distance of the Sun. The European Space Agency has developed a new satellite for Venus in its Venus Express mission8. This satellite will provide a good set of new technologies that can be utilized for our smaller satellite. One new technology is the Gallium Arsenide triple junction solar panel that supplies the Venus Express 1100 W of power and are able to survive the solar rays while orbiting Venus. This design can be scaled down as our mission only requires 200 W of power for the satellite to broadcast our signals. The electronics can be space hardened similarly to how the Venus Express has done as its mission was extended past 2 Venus sidereal days9. This was done with a combination of better radiators with a multi-layer insulation (MLI) coating for thermal control and a gold colored MLI coating to reflect additional radiation away.
Points of Failure
The points of failure for the lander would entirely depend on the refrigeration/power system for its survival because without the cooled electronic enclosure it will fail. Also, if the lander devices were to fail there should be some redundancy for the most likely components to fail. This can be monitored during testing in the GEER facility. The orbiter failure points come largely from the solar panels to power it and the actual orbit of the satellite. Without a correct orbit the information from the lander might be difficult to obtain and re-transmit to Earth.
Risk Assessment, Potential Issues, and Mitigation
Use of newly developed technology
Falcon Heavy: The Falcon Heavy Rocket developed by SpaceX has not been actually used on a NASA mission to date. Its first test flight is scheduled for 2014 and its first planned mission is scheduled for 2015 which would make it viable for our mission; however, there is a possibility that the Falcon Heavy will not be available for our mission due to unforeseen delays. Because the SpaceX Falcon 9 rocket is insufficient for our payload and mission, if the Falcon Heavy is unavailable for this mission, we would be forced to switch to an Atlas V 551 or higher rocket. While this would not necessarily stop or delay our mission, it would add an additional $30-50M to our budget for increased rocket cost. Risk assessment for this possibility is low due to no foreseen issues with the Falcon Heavy and the availably of an Atlas V rocket as a replacement.
Merlin 1D Vacuum: The Merlin 1D Vacuum variant is currently in the final stages of testing and has yet to be used on a NASA mission. It is anticipated to be ready in time for this mission; however, there is risk that if there was a problem with this engine we would need to find a replacement which would have a lower thrust-to-weight ratio. This would require an increase in fuel required for the mission and result in a slightly higher cost for the initial rocket launch due to the increased payload weight. Risk assessment for this possibility is low due to the performance of the Merlin 1D engine and the availability of alternative engines.
Stirling RTG Generator and Cooling System: The Stirling RTG is a newly emerging technology that has not been tested on a NASA mission before. While it has undergone significant testing and we are planning that it will be fully tested and operational in time, it will be a significant time and money investment to ensure that this system will be ready for this mission. Additionally, if this subsystem is not ready in time, there is no viable alternative available and the mission will need to either be postponed by 18 months (next inferior conjunction) or canceled completely. Risk assessment for this possibility is medium due to the lack of a viable alternative and no previous fielding of this type of generator on a space mission before.
Inclusion of a Relay Orbiter
Including a Relay Orbiter in our proposal introduces increased costs to our mission but at the same time adds reliability and reduces the overall risk of the mission. Because of the heavy attenuation associated with the mostly CO2 atmosphere of Venus, it is only possible for a direct link with Earth for the 90-day period centered on the inferior conjunction of Earth and Venus. Because of the timing needed for this orbit, in order to land on Venus at 45 days before an inferior conjunction (the prime arrival date to minimize Earth-Venus distance for a 90 day window), a satellite would have to make multiple orbits around the Sun for the proper conjunction with Venus. This additional time introduces the possibility for problems to arise during the multiple transits. Additionally, arriving on the surface of Venus is a more time in the option of a direct link because landing an additional day or two later on Venus may potentially cut off the final days of the planned mission. Moreover, if the lander manages to survive longer than the planned 90 day period, it would still not be able to send data back to Earth once it was out of range. With the inclusion of a relay orbiter, the exact date of landing on Venus becomes less of an issue as the link distance between the orbiter and lander remains the same with the orbiter being able to communicate clearly back to Earth for nearly the entirety of Venus's orbit. This means that if the lander manages to survive longer than 90 days, it is still possible to conduct secondary missions with the lander increasing the usefulness and efficiency of the mission. Additionally, since a lander only option would still require a large engine and thrusters for the VOI maneuver, nearly half of the cost and mass of the orbiter already would exist in various components of that lander. Our orbiter will only serve as a transponder which will limit its additional cost. The inclusion of a separate orbiter provides for additional reliability and more flexibility at a reasonable cost.
Transponder only on Relay Orbiter
In our current design, our Relay Orbiter only acts as a transponder with no data storage or signal processing options on it. While it would be certainly possible to include the additional hardware to store data and conduct signal processing on the orbiter, we chose not to in the interest of cost savings. While this does introduce the possibility that some data could be lost if there is a problem with either the orbiter or lander given the limited data storage on the lander, we chose to assume this risk because of the multiple passes the orbiter conducts over the lander. Over a 90 day period, it will conduct 180 passes over the lander for 3 hour period each pass. If one or two of these transmissions are lost, it would have little statistical impact on the overall data received from the lander. Moreover, if it was desired to combine this mission to Venus with other missions that desired to conduct experiments and measurements from a satellite, it would be easy to upgrade the capabilities of our orbiter to support additional missions in the interest of cost savings. Risk assessment for the transponder only orbiter option is low considering the multiple passes that the orbiter will make and the possibility of upgrading the orbiter to support additional missions.
Budget and Timeline
Budget
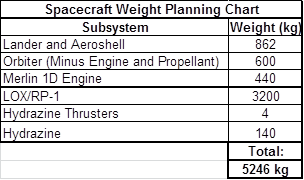
Weight Breakdown
Timeline

Code
- Link Budget (Excel)
- Orbital Path (Matlab)
- Venus Orbital Projection (Matlab)
- Raised Cosine (Matlab)
- Communication (Matlab)
- Q Function (Matlab)