Martographers
Mars' leader in Global Positioning
"If you're on Mars, we'll find you!"
Propulsion and Orbital Correction
Propulsion System
The journey to Mars is going to involve two steps. First, a propulsion system that is high-powered enough to leave Earth’s gravity and enter into low-Earth orbit. Secondly, spacecraft has to be taken from low-Earth orbit to Mars. Because the journey is going to take approximately 48 million miles, a fuel efficient propulsion system is necessary.
Our best option to get to Mars is the Hohman transfer path because this path creates a good balance between fuel expenditure and time. We expect the time of travel for a satellite to start orbiting Mars to be 7 months [1].
Fig 1: Expected Trajectory
For launch location, our option is Baikonur, Kazakhstan. This is going to be a better option than to launch from Florida in terms of cost. Moreover, there have been many missions to Mars starting from Baikonur, and we would like to follow the experiences gained from these missions at that base.
When considering a launch date, there are several important factors. The most important is the alignment of planets on launch date. Launch dates for which the orbit of the spacecraft intersects Mars’ orbit when Mars is also at that location, occurs biannually. Other factors to consider are solar activity and times of high dust storm probability on Mars. Dust storms can damage equipment and make navigation and communications difficult [1].
The expected weight of the satellite including the fuel system is expected to be approximately 3000lbs (1362kg). The propulsion system has to be powerful enough to take this mass from earth into Mars' orbit. The majority of the power required is to escape from Earth's gravity, and is planned to be provided by the launcher spacecraft. Our satellite system is going to be carried by a launcher spacecraft such as Soyuz Fregat.
Fig 2: Soyuz-Fregat ELV
This launch vehicle is an expendable launch vehicle. Soyuz Fregat rockets are capable of creating enough thrust, approximately 990 KNewtons, to provide enough to place our satellite into the desired track. Its launch is going to cost nearly $35 million [2]. After placing our equipment on its path to Mars, the launcher spacecraft will be isolated. The rest of the mission is planned to use an on-board propulsion system. For the propulsion system, we plan to modify the propulsion system of the Mars Express mission done by the European space agency[3]. Our projected propulsion system is going to contain an Astrium 400N Apogee Engine, 16 bipropellant 10N thrusters, an electric propulsion system, and a novel solar sail system. We plan to use Astrium 400N Apogee Engine for impulsive maneuvers and 16 10N thrusters for precision during orbit insertion.

Fig 3: 400N Engine and 10N Thruster
During the cruise stage we plan to use a solar sail system for saving energy by using radiation from the sun as thrust. We plan to use a solar sail panel with a 100 square foot reflective surface and a thickness of 30nm creating a sail with negligible weight compared to payload. The thrust provided by the sail is going to decrease our requirement for chemical fuel which constitutes nearly 95% of spacecraft.
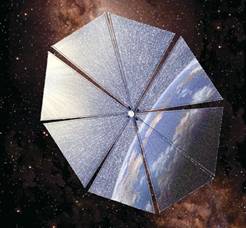
Fig 4: Solar sail
For fine tuning of the orbit we plan to include an electric propulsion system, 8 Atos Arcjet thrusters. We selected a bi-propellant propulsion system for the main propulsion to meet the requirement for a high-performance, low-cost propulsion system with minimum mass. Therefore a capability to create a velocity increment of approximately 3 km/s can be achieved. In our propulsion system, the oxidizer and fuel is supplied from two propellant tanks having a total volume of 540 liters. The propellants are pressure-fed using helium stored in a 35 liter pressure vessel. For trajectory correction maneuvers during the interplanetary cruise phase, the propulsion system was designed to operate in a pressure-regulated mode using only the 10 N thrusters. The 400N main engine is going to be kept inactive during cruise phase which involves leaving Earth's gravity up to reaching Mars. This time interval is expected to be 7 months. A few days before the Mars orbit insertion, the main engine is going to be activated. Therefore, the main engine is going to be tested for safety before insertion into operational orbit. In case of a failure at this critical phase, the mission can still be maintained by using the 16 10N thrusters. Aerobreaking is going to be made by the main engine to decrease the spacecrafts velocity to 9km/s in order to be captured by Mars gravity in order to enter a Martian orbit [4]. After that stage, the 10N thrusters are going to be used to set the satellite into the necessary orbit around Mars. Fine tuning of the satellites' orbit is going to be done via the electric propulsion system. Since our satellite is now within its final orbit, the 400 N main engine and its pressure control assembly will be isolated. The rest of the mission will be performed using solely the 10 N thrusters in blow-down mode and the electrical propulsion system [3]. For the electrical propulsion system we consider to deploy the Altos arcjet thruster. We plan to deploy 8 arcjet thrusters which are 480 grams each. Each thruster creates 115 milinewton thrust, and this force is going to be used in fine tuning for orbital corrections. For arcjet thrusters we plan to keep 52kg of ammonia as arcjet fuel, which is sufficient for 600 hours of operation, which corresponds to approximately 5 years [5].

Fig 5: Altos Arcjet thruster
The expected lifetime of 10N thrusters are 3 years. We plan to deploy more than the needed number of thrusters in the system, and since they will not be used interchangeably, our propulsion system is set to be capable of maintaining the satellites in their orbit for at least 10 years. The overall cost of our propulsion system and expendable launcher vehicle will total approximately $50 million.
Orbital Correction
The subject of orbital correction has three main parts.
- Ground Station Control Centers
- Thrusters for orbital correction
- Attitude control
Ground station control centers (GSCC) are necessary to validate MPS satellite ephemeris data, calculate needed correction, and command satellite to fire thrusters in the required direction at the proper time. Using the GPS system as a benchmark, 6 ground stations should be scattered over the surface of Mars. The ground stations should be in remote location where EMI is minimal. Each of the satellites must report ephemeris data to at least one GSCC each day. The GSCC will use its known position, the MPS system calculated position, and the ephemeris data from the satellite to calculate the satellite of interest's actual location. If a correction is necessary, then the GSCC will command the satellite to fire its thruster accordingly.
Each GSCC must have a directional antenna with adequate gain for uplink and downlink communications with all satellites in the visible sky. A parabolic reflector and standard Elevation over Azimuth configuration should be adequate. One constraint of this configuration is that the antenna will not be able to track a satellite that is directly overhead (El ~ 90 deg). While this will limit the times at which transmissions take place with a particular satellite, it should not prove to be a problem for total system functionality and performance.
There are several options for station keeping thruster aboard the spacecraft. One option that is very efficient is the Xenon Ion Drive which is pictured below.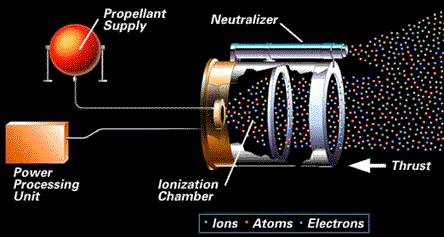
Fig 6: Ion Drive
Boeing is currently producing two variations of the Xenon Ion Propulsion System (XIPS). The Boeing models have been successfully commission as station keeping thrust systems on several earth orbiting satellite systems to date. The primary benefit to using XIPS is the efficiency. Compared to tradition chemical rockets, the XIPS use nearly 90% less propellant to provide the same thrust. This means less cost to launch, greater payload, and longer product lifecycle.
The final aspect of orbital correction deals with the spacecraft attitude. While momentum wheels have been a traditional favorite to accomplish this task, Control Moment Gyroscopes (CMGs) have come to the foreground in recent years. As with XIPS, the primary benefit to the CMG is efficiency. The CMG works by adjusting the orientation of a spinning rotor with respect to the spacecraft.
Fig 7: Example CMG
There are many manufacturers of CMGs, including Honeywell, Astrium, and L-3 Communications. The CMG should be used to ensure that the orientation of the satellite is such that the antenna's RF coverage is as needed.
References:
[1]http://web.mit.edu/12.000/www/finalpresentation/traj/index9t.html
[2]http://en.wikipedia.org/wiki/Soyuz_launch_vehicle
[3]http://www.esa.int/esaSC/120379_index_0_m.html
[4]M.Peukert amd M.Riehle, “Propulsion System and Mission Design of AMSAT P5-A Mars Probe” ,The Second World Space Congress, Oct.2002
[5]http://www.ralfzimmermann.de/phase3d/atos.html