|
SARSAT RescueA ECE6390 Production By:"Can you hear me now?" Actors in Alphabetical Order: Derek Campbell, Rod Drews, Chris Lee, Lisa Moyer, Jason Uher |
 |
Problem: An airline has crash-landed into the Atlantic Ocean and all we have to go on to find survivors is a signal from an EPIRB. We are given the frequency data received by the satellite during its path along the -76o line of longitude. From this data, we must create a method for finding the survivors' coordinates and evaluate our method for accuracy. |
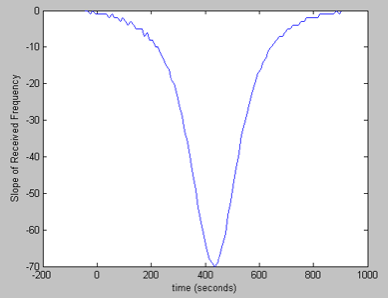 Figure 1. The first derivative of the received frequency. The location of the minimum indicates the time of closest approach (TCA) and the magnitude is relative to the distance from the EPIRB to the satellite. Specifically, the closer the two are, the greater in magnitude the TCA slope will be. Figure 2. Using the simulate and match method, we could find a simulated curve that matches the measure. The blue line is the measure value, and the two red lines are example guesses. The correct guess would align perfectly along the middle section of the blue curve. In Figure 1, a plot of the received signal frequency, which is a decreasing function with horizontal asymptotes located where the minimum and maximum Doppler shifts occur. The relative velocity of the satellite to the beacon causes a frequency shift in the signal received by the satellite. When the satellite is far away from the beacon, the frequency shifts are at a maximum, forming horizontal asymptotes. As the angle between the satellite and the beacon decreases, the relative velocity of the two also decreases. This reduces the Doppler effect measured at the satellite. When the latitude of the satellite and the beacon equals, there is no frequency shift. After the satellite’s latitude passes the EPIRB’s latitude, a negative frequency shift occurs. It may be presumed that the satellite is at the same latitude as the EPIRB when the satellite receives a signal having a frequency of 406 MHz. However, due to perturbations in the clocks of the satellite and EPIRB, we cannot assume that the EPIRB is transmitting at exactly 406 MHz, or that the satellite is reading exactly 406 MHz. Because of this error, we measured the time when the received signal’s frequency is exactly halfway between the two asymptotes resulting in a frequency of 406.000065 MHz. To find the longitude of the EPIRB, we need to calculate the distance between the EPIRB and the satellite (the satellite is on the 76°W longitude line) at an altitude of 850 km. To find the longitude, we used simulation match method. This involves generating numerous plots using an increasing longitude and comparing each plot to the plot generated from the received data. We then chose the plot whose slope was closest to the data plot’s slope. We show a few simulated guesses in Figure 2. Using this method, we were able to narrow the latitude down to 25.4445°N. This places the EPIRB about half way between the coast of Miami, FL and the island Bimini. The following code implements the technique described above to calculate the longitude and latitude of the EPIRB.
|
|
|
Questions Section
|
|
| You can view our other wonderful report at gps.html. | |