
The Crazy Lune
|
The Crazy Lune |
|
|---|
      |
|
Results
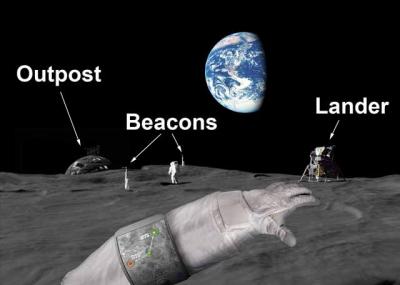
We assume, that at the beginning of the moonwalk a configuration of 4 tags around the lander and the lander itself is already known. This is necessary, because it is not possible to determine position just with the lander. |
|
Now here are some simulations for different paths the astronaut takes and how the algorithm estimates the its location. Videos of this simulations can be found in the Simulation section. The first scenario is when the Astronaut walks on a linear path. This is the worst case, as all tags (and the lander) are lined up and therefore the dilution of precision is maximal. Even in this case, the algorithm did a pretty good job and for a distance of 2 km it achieved an average estimate error under 13m.
Fig 1: Path taken by astronaut (blue) and estimated by algorithm (red) for linear path. Here, a drift in the z-axis can be observed.
2nd scenario where the astronaut takes a random path away from the landerFig 3: Path taken by astronaut (blue) and estimated by algorithm (red) for random path. Fig 4: Position estimation error over time for random path The third scenario is some kind of sinusoidal path. Here the position error is very small. Fig 5: Path taken by astronaut (blue) and estimated by algorithm (red). Both are very close Fig 6: Position estimation error over time.
|
Home | Project | Communication | Location | Power | Budget & Timeline Tuesday, December 8, 2009 © 2009 The Crazy Lune. All rights reserved. |