
The Crazy Lune
|
The Crazy Lune |
|
|---|
      |
|
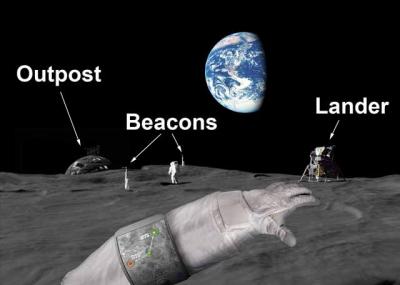
Location As the location algorithm, our system uses an Extended Kalman Filter. This filter estimates the position of the astronaut, based on distance measurements to different tags.This means each second, we send out a short pulse that is supposed to power on all nearby tags. These tags send out a bit sequence (multiplied with the CDMA chipping sequence) to the astronaut. The time of arrival is measured by the astronaut, based on which we can determine the distance of the tag from the astronaut. Additionally, we can determine the distance of the astronaut from the lander at all times using the astronaut to lander communication link. The advantage of using this scheme allows us to have the exact position of a fixed point. |
|
The above video displays the results of the algorithm when the Astronaut takes a sinusoidal path in x,y and z direction. This is one of the best case scenarios, as all tags (and the lander) are aligned in a sinusoidal path and therefore the dilution of precision is reasonably low. In this case, the algorithm did a great job and for a distance of 2 km it achieved an average estimate error under 5m. Advantages Some of the major advantages which come along with the use of this algorithm are:
It is vital for the accuracy of the system to have a good estimate of each tag estimation, as this error cannot be further removed and will cumulate over time/distance.
|
Home | Project | Communication | Location | Power | Budget & Timeline Tuesday, December 8, 2009 © 2009 The Crazy Lune. All rights reserved. |