
The Crazy Lune
|
The Crazy Lune |
|
|---|
      |
|
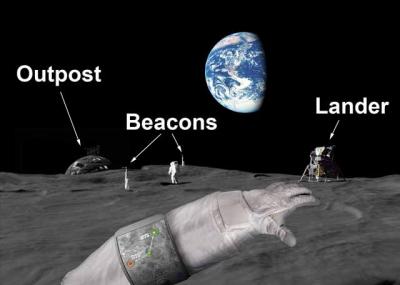
Distance Measurement RFID-Tags to Astronaut
We measure the distance of the RFID Tags to the astronaut in the following way: |
|
We calculated the (CNR)despread for the link which shall be used to calculate the estimated error due to noise in one dimension. Where PRtag is the received power from the RFID Tag, PNAR is the Noise Power which includes Noise due to system temperature as well as other sources of noise on the surface of the moon (using the Astronaut to RFID Link). The position error due to noise is given by SigmaNAR.
We used the following values for the variables to get the estimated error: Tbit= 0.05 sec; The bit interval
Tc=2.5*10^-6 sec; The chipping interval
M=20480 ; Processing gain=Tbit/Tc
Tint= 10*Tbit; The averaging interval of the readings from the tags
Q= 7; The average number of tags in the range of the Astronaut
There are a number of errors which affect the precision of our location accuracy. The major ones being the Receiver Noise Error, Multi-path Error and Error due to time delay in reading from the RFID Tag. We get an estimate of the Receiver Noise error from the Astronaut to RFID Link calculations. We assume a reasonable multi path error within the radius of 50 meters as 1 meter,considering the fact that the terrain on the moon is relatively even and there are no high rise buildings. Also, the error due to time delay will approximately be 3 meters.This error accounts for the time it takes to power up the RFID tag. We assume a constant time for the RFID tag to power up and an additional variable delay based on the magnitude of received power. There is a level of uncertainty in the magnitude of received power as it varies with the distance between Astronaut and the RFID Tag. Hence, we assume an approximate error of 3 meters. The total error is approximated using the Root Mean Square Error which is given by: where, Distance Measurement Lander to Astronaut For the distance measurement of astronaut to the lander, we use a TDoA (Time difference of arrival) scheme between the lander and astronaut. As we don't use spreadspectrum for this link, we assume a speadspectrum with processing gain of M=1. This is used in the formula for error due to noise using following paramters: Tbit= 0.05 sec; The bit interval
Tc=Tbit; The chipping interval
Tint= 100*Tbit; The averaging interval of the readings from the tags
The other parameters of the link remain same as before(Astronaut to Lander Link). On substituting the values in the (CNR)Despread formula above, we get:
We synchronize the clocks on the Lander and the Astronaut to avoid large clock errors and assume a conservative error of 1.5 meters. The multipath error will be a little more dominant in this link as compared to the Astronaut to RFID Link. We shall assume a multipath error of 2 meters for a maximum link distance of 2 kilometers from the Astronaut to the Lander.
The total error is approximated using the Root Mean Square Error which is given by: where,
|
Home | Project | Communication | Location | Power | Budget & Timeline Tuesday, December 8, 2009 © 2009 The Crazy Lune. All rights reserved. |