
Introduction
The DISOPS project's goal is a simple one: take what would be impossible or impractical to do with a single, large rover (and hence, a single, large point of failure), and distribute this over multiple, smaller, networked sensors to provide a more complete and holistic view of the situation. Ideally, the DISOPS sensor system will consist of numerous cheaper component that only cost a fraction of what a larger, multipurpose system would cost. With NASA's Curosity rover, the centerpiece of its Mars Science Laboratory mission, costing $1.8 billion USD, and the European Space Agency's arguably far less complex Venus Express still costing more than $290 million USD, there is tremendous opportunity for a large scale, relatively inexpensive sensor system for research and exploration of our solar system [1],[2].
SiCLOPS mission is the purest embodiment of DISOPS - place a distributed network of VIRGIL ( Very Integrated & Redundant Ground Idling Laboratory) units across several areas of interest on the Venusian surface. Due to the cheap, expendable nature of these systems, and the incredibly harsh surface and atmosphere of Venus, each of these units will be able to communicate with not only other VIRGILs through a monopole antenna, but be able to hand off transmitting duties to an optimally placed VIRGIL - a possibility not even conceivable with the paradigm of a single, large rover - which will provide redundancy. As many as 20 VIRGIL units are to be deployed on the surface of Venus. Figure 1 shows a high level diagram of the proposed VIRGIL array.
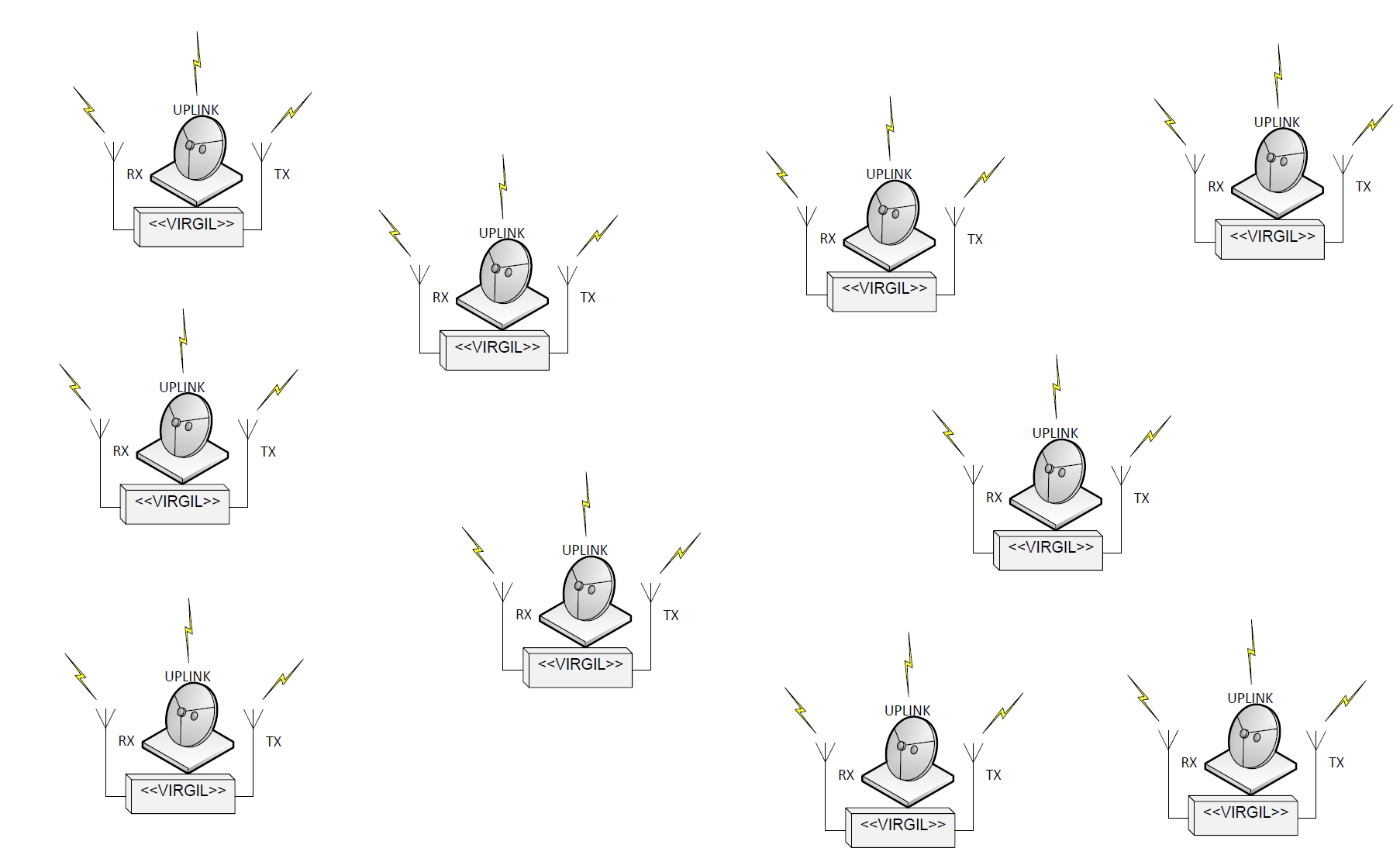
Figure 1. VIRGIL Network.
Theory of Operation
Figure 2 shows the concept of the VIRGIL systems. Interconnections between the different components and cooling systems are omitted for clarity. Only 1 VIRGIL at a time will communicate with the orbiting satellite. VIRGIL, using an embedded Linux Processor, will take raw information from the sensor and pass it along the RS-232 IO port. VIRGIL will have a dedicated 256GB storage solid state drive on board for a buffer and will only store seismic events. Upon reception of a seismic event, VIRGIL will write this to its solid state drive. It will then output this over the RS-232 connection to be modulated by our BPSK hardware and sent out to it the VIRGIL's physical closest neighbor as predetermined by RSSI every 5 minutes. The physical neighbor will then check a software defined variable to see if it the currently transmitting VIRGIL. If it is not, the VIRGIL will store this information and continue to pass the seismic event to other nearby VIRGILs. When the uplink VIRGIL transmits the seismic activity to the orbiter, it will then send an acknowledgement 'backwards' to the originator VIRGIL, while at the same time 'handing off' uplink duties to the most optimal VIRGIL. The flowchart for VIRGIL data transmission can be seen in Figure 3.

Figure 2. Block Diagram of a VIRGIL unit.

Figure 3. Flow chart for transmission protocol.
[1] National Aeronautics and Space Administration. "Mars Science Laboratory/Curiosity." Internet: http://solarsystem.nasa.gov/missions/profile.cfm?InFlight=1&MCode=MarsSciLab&Display=ReadMore, [July 21, 2014].
[2] European Space Agency. "Venus Express Frequency Asked Questions (FAQs)." Internet: http://www.esa.int/Our_Activities/Space_Science/Venus_Express/Frequently_asked_questions, Nov 8, 2005 [July 21, 2014].
[2] European Space Agency. "Venus Express Frequency Asked Questions (FAQs)." Internet: http://www.esa.int/Our_Activities/Space_Science/Venus_Express/Frequently_asked_questions, Nov 8, 2005 [July 21, 2014].
Team Members
- Michael R. Coulter
- Christy D. Saintsing
- Charles A. Sutlief
- Marie Shinotsuka