
| Overview | |||
|
|||
| Launch/Orbit | |||
|
|||
| Rover/Lander | |||
|
|||
| Communications | |||
|
|||
| Project Execution | |||
| |||
| Project Management | |||
| |||
| References |
| Communication Systems |
| The communication systems design is laid out below under several headings. Included are details regarding the functionality of the communications systems in the VagaLune Lunar Module (LM) and Moon Rover (MR) as well as block diagrams of the systems and communication chains. |
| Lunar Module Systems Flight Control Software Program (FCS) The Flight Control Software (FCS) will be preloaded with the orbital transfer program prior to the launch of the VagaLune probe. The software shall maintain a representation of the probes position in an earth-centric coordinate system. The FCS will be responsible for issuing commands to the thruster control systems to adjust or correct the position and velocity of the probe. The FCS will access several sensor systems to compute the initial current position of the spacecraft. The Inertial Navigation System (INS) will provide information on the ...More Details |
| Lunar Module Communication Protocol Introduction The data encoding choices made between a spacecraft and an Earth station dictate the manner in which data is transmitted between them. The VagaLune project will incorporate a proprietary encoding scheme for both...More Details |
| Lunar Module Software Diagram Lunar Module Software Diagram |
| Moon Rover Systems Power Management (PM) The Power Management (PM) routines will be responsible for adjusting the power usage levels on the Moon Rover (MR). An X-prize requirement is that the rover survive a lunar night, a 14-day period when the MR will be in darkness. In this period, the MR will shut down all major systems and operate off an internal lithium-ion battery. The PM will be responsible for managing the MR entering and leaving hibernation. During normal operations the PM will adjust the power usage based on the available solar power. The PM will interface with the power hardware on the MR, as well as...More Details |
| Moon Rover Communication Protocol Introduction The data encoding choices made between a spacecraft and an Earth station dictate the manner in which data is transmitted between them. The VagaLune project will incorporate a proprietary encoding scheme for both...More Details |
| Moon Rover Software Diagram Moon Rover Software Diagram |
| Communication Diagrams Communication between the Earth and the lunar module will be accomplished by modulating a turbo coded signal onto a carrier frequency. The signal will encoded and decoded using the S2002 DVB-RCS. After encoding, bits are converted to Gaussian pulses. Two pulses are then sent simultaneously using a QPSK modulation. One will be modulated on the in phase and the other on the on the quaternary phase. The up-link signal will be modulated onto a carrier frequency of 2119 MHz and the down-link signal will be modulated on to a carrier frequency of 2278.5 MHz. When the signal is received it will be demodulated into an in phase and quaternary phase signal and sent through a matched filter. The output bits are then sent into a DPQSK receiver which outputs the bits into our turbo decoder. |
Communication Chain with DQPSK demodulation: More Details 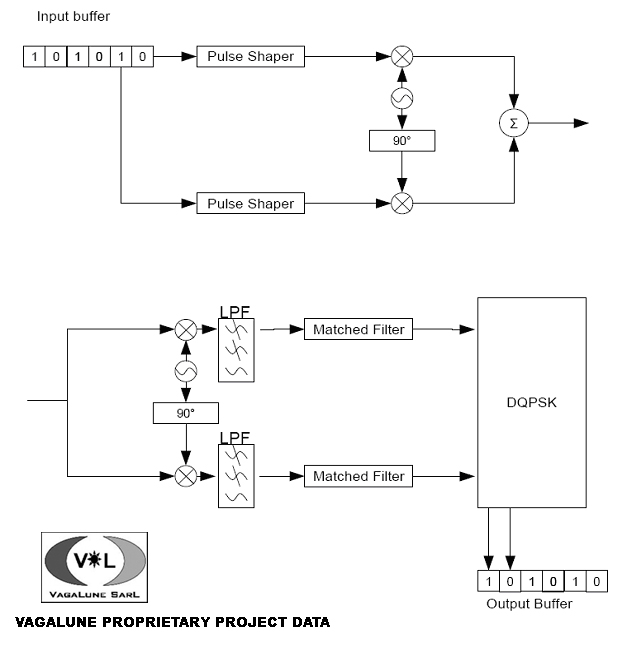 |
DQPSK detector after [Che:93] 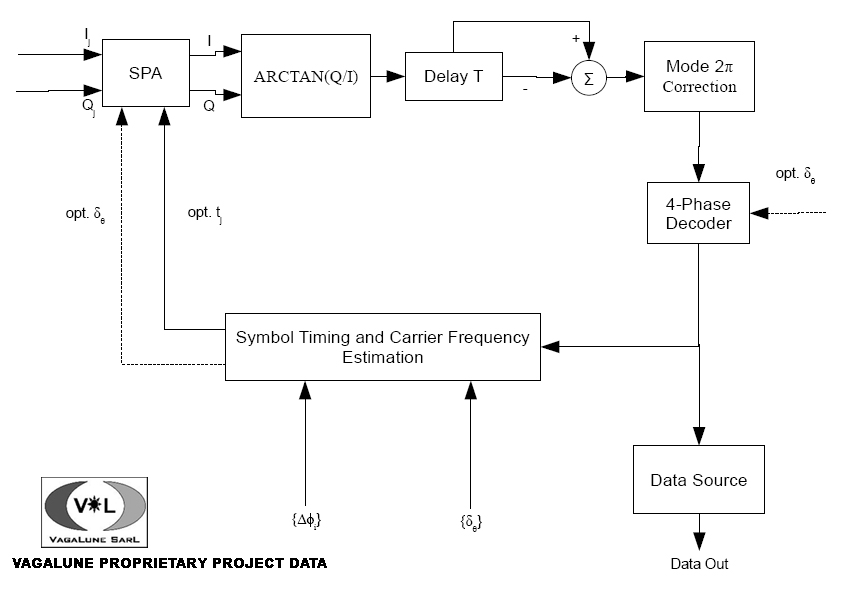 |